Rétroaction
Fondamental :
Un système bien conçu peut être tout à fait satisfaisant du point de vue de son comportement s'il n'est pas perturbé.
C'est l'utilisateur qui commande directement le système en fonction de son ressenti (le système n'est donc pas automatisé). On dit alors que la commande est en boucle ouverte ou en commande directe.

Lorsque le système est perturbé par un événement extérieur (appelé perturbation), la valeur de la sortie ne correspond pas à la valeur attendue.

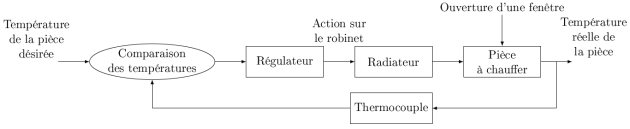
Pour automatiser le système sans intervention humaine, on introduit une boucle de retour (ou rétroaction). Le système est alors dit en boucle fermée.
La boucle de retour, constituée d'un capteur, permet d'évaluer la situation à chaque instant et fournit un état de la sortie à la partie commande. Cette information est analysée par la partie commande et comparée à la consigne. Cette dernière élabore alors un signal qui permet de commander la partie opérative.
Remarque :
Lorsque la boucle de retour est constituée d'un capteur, que l'information délivrée par ce capteur est utilisée et que la nature de la grandeur de sortie est identique à celle de consigne, on parle d'asservissement.
Il existe des systèmes qui sont physiquement et naturellement bouclés (moteur, vérin...), où la boucle de retour ne correspond pas à un capteur ajouté par l'Homme. Dans ces conditions, on parle juste de boucle fermée mais pas d'asservissement.