Présentation générale
L'axe MaxPID est extrait d'un mécanisme rencontré sur des robots utilisés pour la cueillette de fruits ou encore pour le tri des ordures ménagères en plastique.

Impossible d'accéder à la ressource audio ou vidéo à l'adresse :
La ressource n'est plus disponible ou vous n'êtes pas autorisé à y accéder. Veuillez vérifier votre accès puis recharger la vidéo.
Le système de cueillette de fruits possède 4 cellules de cueillette telle que celle présentée ci-dessus. Ces cellules sont portées par un véhicule automoteur autoguidé et guidé par une caméra vidéo fixée à l'embase.
Chaque cellule, munie de son tube de préhension, est construite autour d'une caméra de vision artificielle qui détermine la position du fruit et en transmet les coordonnées à la partie commande, laquelle détermine les ordres à transmettre à la partie opérative constituée ici d'un système mécanique articulé.
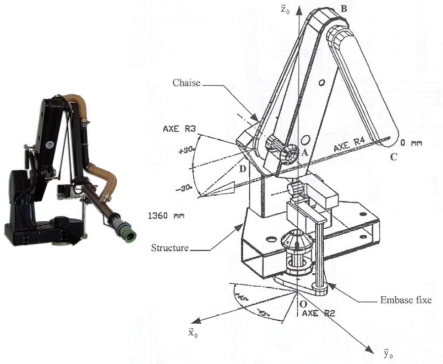
On définit :
Axe | Nom | Description |
|---|---|---|
R1 | Transport | Translation d'axe horizontal de l'embase fixe (liée au véhicule) entre les arbres |
R2 | Azimut | Rotation d'axe vertical de la structure par rapport à l'embase fixe |
R3 | Site | Rotation d'axe horizontal de la chaise par rapport à la structure |
R4 | Élongation | Translation dans l'axe conservant les angles de site et d'azimut |
Les axes R2 et R3 définissent les deux angles de visée :
azimut : angle entre les deux plans verticaux mesuré dans un plan horizontal,
site : angle mesuré dans un plan vertical entre l'horizontale et la direction de visée.
La donnée de ces deux angles permet de pointer la direction définie par la caméra.
L'axe R4 produit une élongation. Il assure la translation du tube d'aspiration dans la direction du fruit suivant l'azimut et le site définis par la caméra. Cette élongation est réalisée avec une cinématique de pantographe, c'est-à-dire une combinaison de 2 rotations. Ce mouvement est généré par un moteur assisté d'un jeu de bielles afin de maintenir le bras préhenseur dans une direction donnée.
Finalement, la cellule n'utilise pour sa fonction principale "cueillir des fruits" que des mouvements de rotation mus par des mécanismes tels que l'axe asservi MaxPID.