Schéma blocs causal
Définition : Causalité
On parle de causalité lorsque l'entrée précède nécessairement la sortie (principe de cause à effet).
Définition : Schéma blocs causal
Pour les schéma-blocs causaux, on définit à l'avance la grandeur d'entrée (cause) et la grandeur de sortie (effet) de chaque composant, en les choisissant parmi les grandeurs physiques intervenant dans le comportement d'un constituant, et en se basant sur la notion de causalité.
Remarque :
La source d'énergie n'est pas représentée ; elle est cependant indispensable pour que le système puisse fonctionner.
Fondamental : Trois éléments graphiques principaux
Bloc : contient un nom ou une fonction, et possède une ou plusieurs entrées / sorties choisies parmi les grandeurs physiques qui interviennent dans le comportement du constituant. Le nom du bloc est en général le nom du composant (moteur, réducteur, roue...) ou encore l'opérateur mathématique associé à une fonction particulière (exemple : l'opérateur \(\int\) pour décrire une intégration du type passage d'une vitesse à une position mais qui n'a pas de matérialisation physique). Les variables d'entrée et sortie de chaque bloc sont décrites par des flèches entrantes ou sortantes
Sommateur : réalise des opérations mathématiques du type addition, soustraction, seuil . . . (opérations réalisées par la partie commande en général)
Jonction : une variable est réutilisée comme entrée d'un bloc
Méthode :
Pour réaliser un schéma-blocs, on place la grandeur de consigne tout à gauche, la grandeur que l'on souhaite étudier à droite, puis on relie les blocs entre eux. Outre la construction du schéma-blocs à partir de la chaîne fonctionnelle, vous devez être capable de construire un schéma-blocs à partir d'une description littérale d'un système, voire même en présence visuelle d'un système.
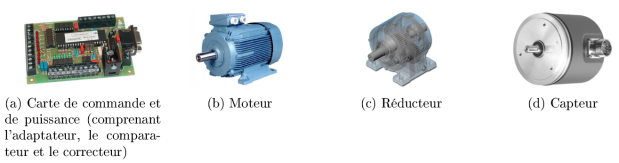
Exemple : Description de l'asservissement en vitesse de rotation d'un bras de robot
Une consigne de vitesse de rotation \(\omega_c \ [rad/s]\) est adaptée à l'aide d'un adaptateur en une tension de consigne \(u_c \ [V]\). Cette tension de consigne est comparée à la tension \(u_m \ [V]\) délivrée par le capteur de type génératrice tachymétrique, proportionnelle à la vitesse réelle \(\omega \ [rad/s]\). L'écart de tension \(\varepsilon \ [V]\) est corrigé par un correcteur qui fournit la tension de commande \(u_{com}\ [V]\) au variateur pilotant le moteur par une tension \(u_{mot}\ [V]\). Le moteur convertit cette tension en vitesse de rotation \(\omega_{mot}\ [rad/s]\), puis cette vitesse est adaptée par un réducteur pour obtenir la vitesse de sortie \(\omega \ [rad/s]\).