Système linéaire
Définition :
Un système est dit linéaire si la fonction qui le décrit est elle même linéaire. Cette fonction vérifie alors le principe de proportionnalité et de superposition.
Remarque :
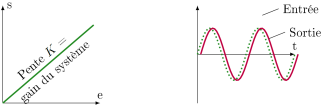
En relevant la valeur asymptotique de la sortie (régime établi ou permanent) pour différentes entrées échelon, on peut obtenir la caractéristique du système : \(sortie=f(entree)\).
Dans le cas d'un système linéaire, cette courbe est une droite de pente K appelé gain du système.
La réponse d'un système linéaire en régime établi est de même nature que l'entrée.
Attention :
Ne pas confondre la caractéristique d'un système \(s = f(e)\) avec la courbe \(s(t)\) qui représente l'évolution temporelle de la sortie et qui est très souvent non-linéaire.
Principe de proportionnalité
Définition : Principe de proportionnalité
Si \(s(t)\) est la réponse à l'entrée \(e(t)\), alors \(\lambda s(t)\) est la réponse à l'entrée \(\lambda e(t)\).

Principe de superposition
Définition : Principe de superposition
Si \(s_1(t)\) et \(s_2(t)\) sont les réponses respectives des entrées \(e_1(t)\) et \(e_2(t)\) , alors \(s_1(t)\) + \(s_2(t)\) est la réponse à l'entrée \(e_1(t)\) + \(e_2(t)\)

En étudiant les réponses du système pour des entrées simples (comme les signaux tests), et en utilisant les propriétés de linéarité (proportionnalité et superposition), il est alors possible d'obtenir la réponse du système à des signaux plus complexes.
Non linéarités
La plupart des systèmes physiques ne sont pas linéaires sur la totalité de leur domaine d'utilisation.
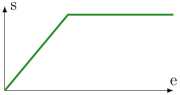
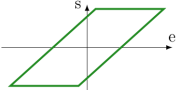
Ci-après, quelques exemples de non-linéarités couramment rencontrés avec leur courbe caractéristique \(s = f(e)\) associée.
Saturation | Seuil | Hystérésis | |
|---|---|---|---|
Courbe caractéristique |
|
|
|
Exemple | Butée mécanique, alimentation, moteur électrique... | Frottement dans un moteur | Jeux mécaniques, élastomères, cycles magnétiques... |

Linéarisation
Cependant, lorsque le système est utilisé dans une zone réduite du domaine d'application, il est possible de "linéariser" la réponse du système dans cette zone autour d'un point de fonctionnement de la caractéristique.
Il s'agit souvent en pratique d'une approximation par la tangente au point de fonctionnement, appelée "linéaire tangente". Le système est alors dit linéarisé.
