Caractéristiques
Fondamental :
Une relation fondamentale lors de la modélisation des systèmes mécaniques est la relation permettant de passer de la vitesse \(v(t)\) à la position \(x(t)\) (ou de l'accélération \(a(t)\) à la vitesse \(v(t)\)) :
Ainsi la position \(x(t)\) est donnée par la relation : \(x(t) =\int_0^t v(t) \ dt\).
La relation entre l'entrée et la sortie peut donc s'écrire ainsi :
Réponse temporelle à une entrée en échelon, et en rampe.
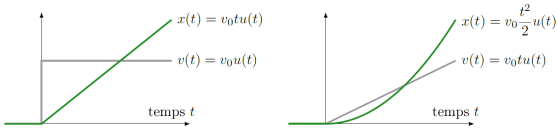
En supposant que les conditions initiales sont nulles :
quand la vitesse est constante, la position est une droite
quand la vitesse est une droite, la position est une parabole.
On notera que pour \(t \leq 0\), la position est nulle.
D'autres systèmes sont modélisables par un intégrateur :
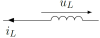
Exemple : Domaine électrique
Relation entre le courant et la tension dans une bobine : \(u_L(t) = L\ \frac{d\ i(t)}{dt}\) (avec \(L\) l'inductance de la bobine)
Exemple : Domaine thermique
relation entre la température et la puissance fournie par un radiateur dans une pièce sans perte : \(C \ \frac{d\ T(t)}{dt}= P_{recue}(t)\) (avec \(C\) la capacité thermique de la pièce, \(P_{recue}(t)=\frac{U(t)^2}{R}\) où \(U\) est la tension d'alimentation du radiateur et \(R\) la résistance du radiateur)
Remarque :
Même si on parle de relation intégrale, on utilise souvent la forme dérivée entre les paramètres afin de faire apparaître des équations différentielles.
Attention : Homogénéité
Le gain statique \(K\) est ici homogène au rapport de \(\frac{d s(t)}{dt}\) sur \(e(t)\).