Paramétrage d'un schéma cinématique
Chaque liaison relie deux classes d'équivalence ; à chacune peut être associé un repère.
La position et l'orientation relatives des deux repères dépendent des degrés de liberté de la liaison : plus ils sont nombreux, plus il faudra poser de paramètres pour définir correctement les deux repères. Ces paramètres sont de deux types :
de rotation (par exemple \(\theta\))
de translation (par exemple \(\lambda\))
Méthode : Paramétrer une classe d'équivalence
Lier un repère à chaque classe d'équivalence (prendre en compte les caractéristiques géométriques du ou des solides, et le positionnement des autres liaisons : axe de symétrie, normale à un plan tangent, etc.)
Définir des longueurs constantes (\(l\), \(a\), \(b\), \(c\), \(d\), etc..) entre les points particuliers de la classe d'équivalence
Méthode : Paramétrer une liaison
Introduire autant de paramètres de position (\(x\), \(\lambda\), \(\mu\), etc.) que de degrés de liberté en translation rectiligne
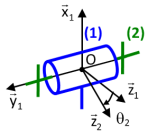
Introduire autant de paramètres d'orientation (\(\alpha\), \(\beta\), \(\theta\), \(\gamma\), etc.) que de degrés de liberté en rotation
Remarque : Distinguer base et repère
Si une liaison ne modifie pas l'orientation entre deux solides (i.e. il n'y a que des paramètres de translation), ces deux solides peuvent être représentés par deux repères utilisant la même base. En effet, le passage d'une base à une autre n'a de sens que pour décrire un changement d'orientation, pas de position.