Mesure de position et vitesse des moteurs
Les moteurs à courant continu sont équipés de codeurs incrémentaux possédant 512 fentes et 2 voies.
Un traitement des signaux créneaux en quadrature générés par la rotation du moteur permet de connaître par comptage la position angulaire du moteur.
Il est ainsi possible d'obtenir une précision de 0,17° au niveau de chaque moteur.
Le laparoscope est piloté en vitesse à partir d'asservissements de vitesse des moteurs qui utilisent l'information des codeurs.
Pour un positionnement particulier du laparoscope (suivi de trajectoire par exemple) ou pour des mesures de position dans un cadre pédagogique, il est nécessaire de procéder à une prise d'origine des moteurs.
La prise d'origine retenue consiste à faire remonter le parallélogramme en position haute jusqu'en butée et à assigner la position nulle.
Principe de fonctionnement
Les codeurs délivrent une information du déplacement sous forme de train d'impulsions. Le nombre d'impulsions décompté à partir d'une origine permet d'avoir accès à la position, tandis que la fréquence du signal renseigne sur la vitesse du disque.
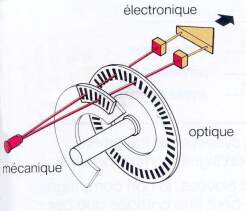
La mise en translation du capteur, lié mécaniquement à l'axe dont on souhaite mesurer la position fait tourner un disque qui lui est solidaire. Ce disque comporte une succession de parties opaques et transparentes (appelées fentes).
En déplaçant la tête par rapport à la bande possédant une succession de fentes opaques et transparentes écartées de la même distance, une lumière, émise par des Diodes Électro Luminescentes (DEL ou LED en anglais), traverse les fentes de ce disque créant sur les photodiodes réceptrices un signal analogique. Ce signal est amplifié, converti en un signal carré puis transmis à un système de traitement par un dispositif électronique.
Etant donné qu'il y a deux fourches optiques, lors d'une rotation régulière dans le même sens, on observe donc des signaux sous la forme suivante :
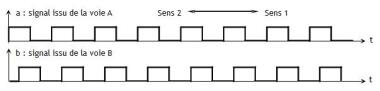
La mise en quadrature de phase des deux signaux présente deux avantages :
selon le sens de translation, on aura un passage du niveau 0 au niveau 1 du signal a quand b = 0 (sens de translation 1) ou quand b = 1 (sens de translation 2) : il suffira alors de regarder la valeur du signal issu de la voie B quand le signal issu de la voie A passe de 0 à 1
on peut doubler voire quadrupler sans aucun investissement supplémentaire la résolution de ce capteur (donc en ayant l'équivalent d'un capteur à deux voire quatre fois plus de fentes !) en combinant les signaux par une loi logique très simple et classique : la loi OU EXCLUSIF
Pour pouvoir connaître la position de l'arbre, il est nécessaire d'adjoindre à ce capteur un compteur permettant de déterminer le nombre d'impulsions observées et par là, connaissant la distance entre deux fentes, de connaître la position avec une précision directement liée à la résolution du capteur.
Obtention de la vitesse angulaire
Pour obtenir la vitesse du moteur, il est possible d'utiliser un composant électronique convertisseur fréquence/tension mais en général le signal obtenu est bruité et il faut lui adjoindre un filtre RC qui risque de nuire à l'identification de la constante de temps du moteur.
Dans le système didactisé, la vitesse est obtenue en dérivant numériquement le signal numérique de position obtenu en calculant à chaque instant la quantité Δpos/Δt où Δt est le pas de temps d'acquisition (de l'ordre de la milliseconde). Une petite erreur sur la position entraîne une grande erreur sur le calcul de vitesse mais compte-tenu de la précision du codeur cette erreur est minime (on peut lisser numériquement la courbe à l'aide d'un filtre à moyenne glissante par exemple).