Manipulation avec énergie
Cliquer dans la fenêtre principale sur l'icône PID puis cocher la case « Maxpid asservi ».
Mettre 20 dans la valeur du Gain Proportionnel et 0 pour le gain intégral et le gain dérivé. Ne pas toucher aux autres paramètres pour l'instant. Valider.
Dans la fenêtre générale, régler les paramètres d'une consigne de type échelon de position :
Entrer une valeur de 30° dans la case de position désirée puis cliquer sur « Échelon de position ».
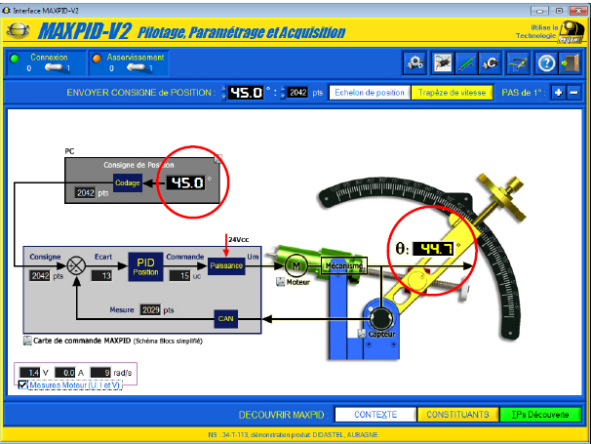
Observer le bras se mettre en mouvement et se stabiliser.
Relever la valeur atteinte.
Mettre la poignée dans la fente latérale du Maxpid et essayer de modifier la position du bras.
Envoyer une nouvelle consigne de 0° pour revenir en position initiale. En décochant la case « Maxpid asservi » et en utilisant la poignée, observer le comportement du bras Maxpid.