Exercice : Changements de base
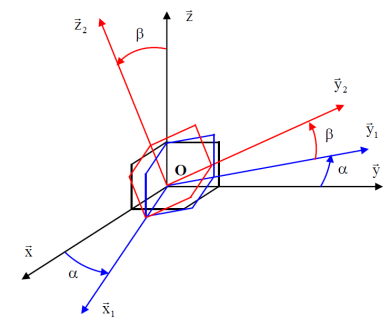
Soit \(R (O ; \vec x, \vec y, \vec z)\) un repère orthonormé direct. La base \((\vec x_1, \vec y_1, \vec z)\) est définie par une rotation de la base \((\vec x, \vec y, \vec z)\) autour de \(\vec z\) d'un angle \(\alpha\) (défini positif). La base \((\vec x_1, \vec y_2, \vec z_2)\) est définie par une rotation de la base \((\vec x_1, \vec y_1, \vec z)\) autour de \(\vec x_1\) d'un angle \(\beta\) (défini positif).
Question
Tracer deux figures représentant les différentes bases sous forme de projections orthogonales par rapport aux vecteurs de rotation.
Question
Calculer : \(\vec x \wedge \vec z_2\), \(\vec y \wedge \vec z_2\) et \(\vec y_1 \wedge \vec z_2\).
Question
Calculer \((\vec x \wedge \vec y_2).\vec x_1\).