Paramétrage de la position de l'origine
Un simple vecteur position définit la position de \(O_1\) dans le repère \(R\) : \(\overrightarrow{O O_1}\). Les trois coordonnées du vecteur position correspondent aux trois paramètres indépendants nécessaires pour définir la position de \(O_1\).
Suivant le système de coordonnées utilisé, ces paramètres seront :
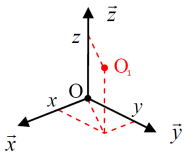
trois longueurs \((x, y ,z)\) dans le systèmes de coordonnées cartésiennes
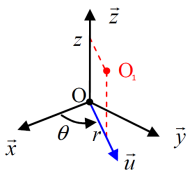
deux longueurs et un angle \((r, \theta, z)\) dans le système de coordonnées cylindriques
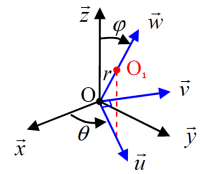
une longueur et deux angles \((r, \theta, \varphi)\) dans le système de coordonnées sphériques
Remarque :
On peut considérer grossièrement que les paramètres de position permettent de caractériser l'éloignement du solide 1 par rapport au solide 0.