Modélisation SysML - Cahier des charges
Analyse externe
Exigences
Manipuler un objet tel qu'un laparoscope n'est a priori pas une tâche compliquée pour un robot. Mais les contraintes ergonomiques imposées par le monde médical sont assez spécifiques. La laparoscopie est très exigeante en dextérité et en concentration.
La première qualité essentielle que doit posséder un robot d'assistance est de réaliser son travail en perturbant le moins possible le déroulement de l'opération. Ainsi, l'extrémité distale du laparoscope doit pouvoir être déplacée dans un volume de travail intra-abdominal suffisant, mais le robot doit rester compact et ses mouvements ne doivent pas gêner les gestes des mains du chirurgien.
Celui-ci doit aussi pouvoir opérer dans une position confortable. Il est donc primordial de placer le robot en conséquence et sans être contraint par la localisation de l'incision.
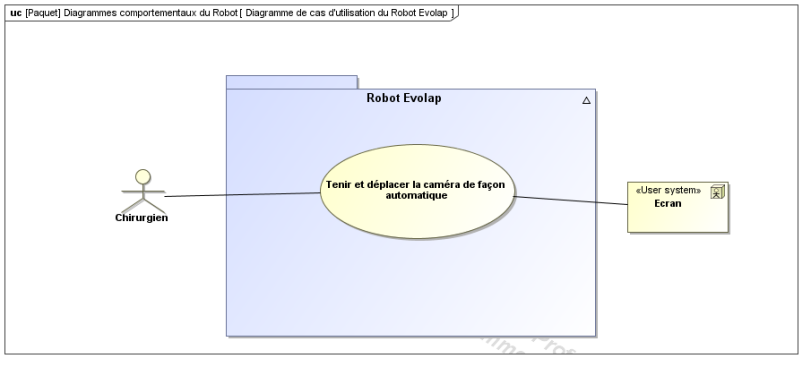
Les mouvements de l'image induits par le dispositif sont également fort importants. Le chirurgien doit pouvoir amener rapidement le laparoscope où il veut, par une interface de contrôle simple et intuitive. Et dans certaines situations, comme en début d'intervention lors de l'observation préliminaire de la cavité, il serait intéressant de pouvoir déplacer momentanément la caméra à la main, sans bien sûr devoir la détacher du robot.
L'installation du robot et sa mise en marche doivent être très simples pour ne pas allonger la durée opératoire. Il doit pour cela être léger et aisément manipulable. Les réglages spécifiques au patient et au type d'intervention doivent être aussi peu nombreux que possible, et une modification de la hauteur ou de l'inclinaison de la table en cours d'intervention ne doit en aucun cas demander d'ajustement supplémentaire du robot.
Enfin, le robot doit bien entendu être conçu pour ne mettre en péril ni le patient, ni les membres de l'équipe chirurgicale, à aucun moment.
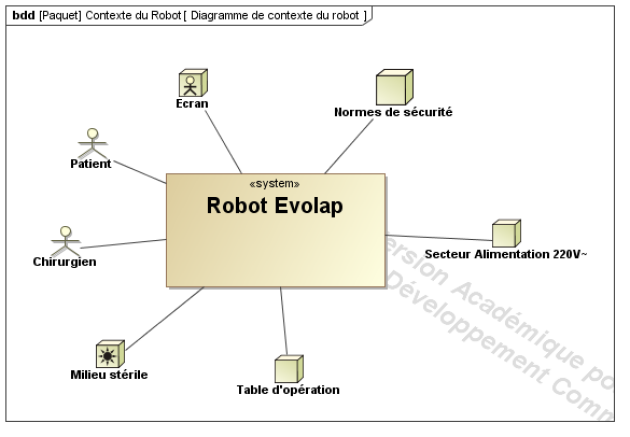
Ces considérations constituent les lignes directrices qui permettent de conduire à un diagramme des exigences.
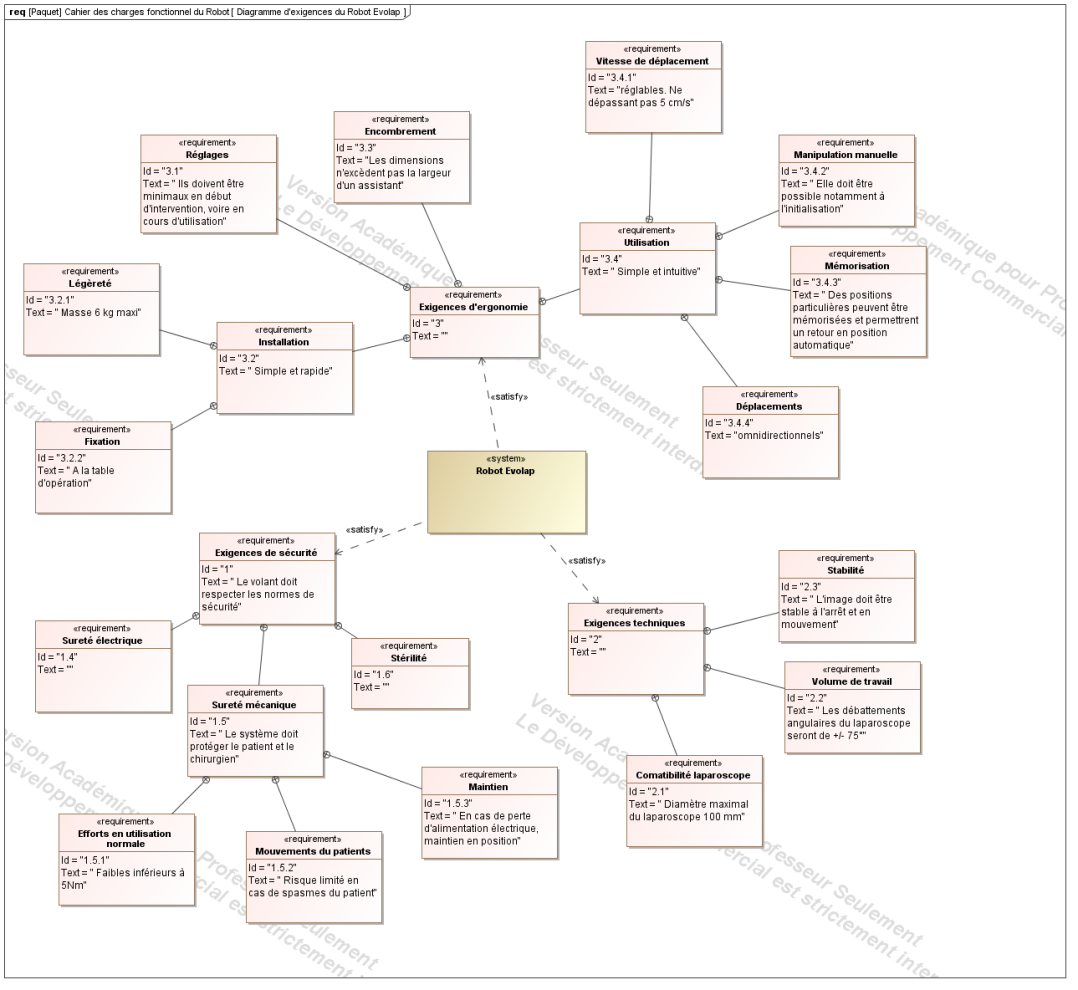
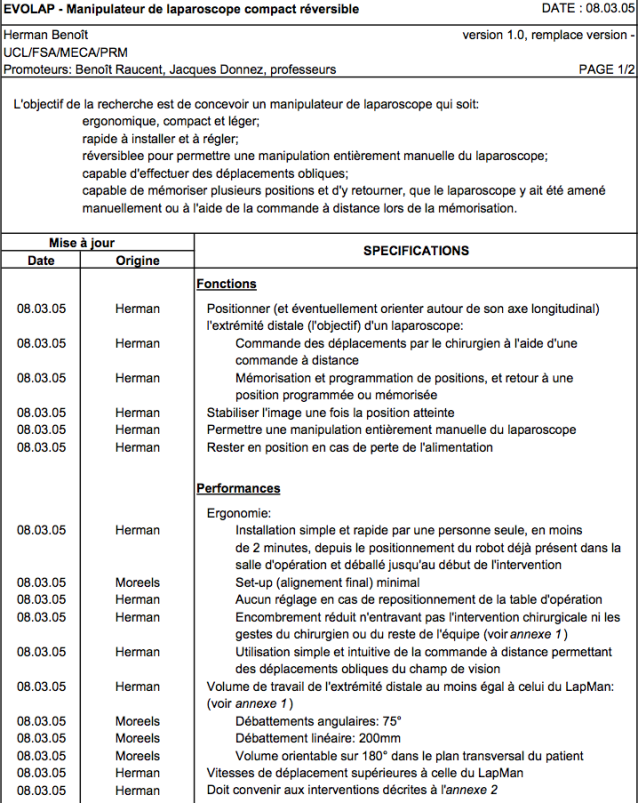
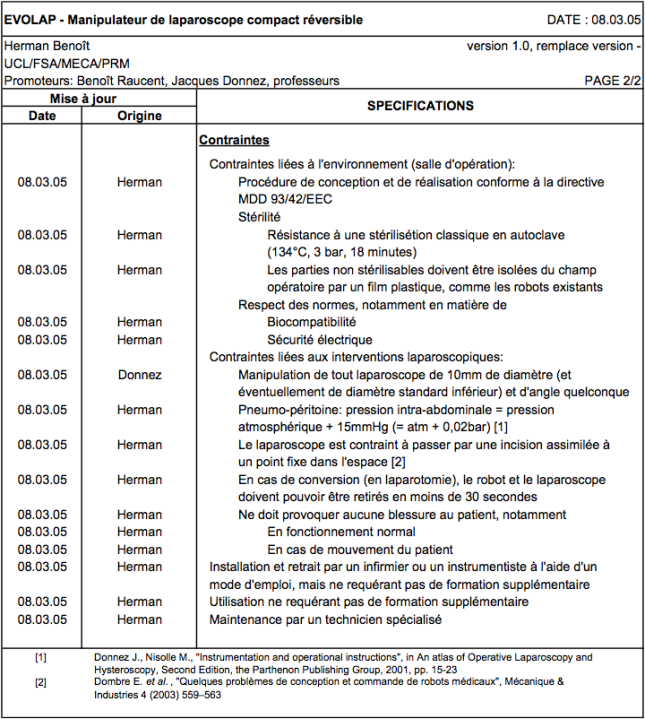
Cahier des charges initial du robot EVOLAP
Le robot EVOLAP a été développé par l'Université Catholique de Louvain (UCL) lors de la thèse de B. Herman. L'objectif du travail a été d'élaborer un robot qui a pu être utilisé en salle d'opérations. L'UCL est en phase de recherche de partenariat industriel pour la commercialisation.
Le cahier des charges fixé pour la conception de ce robot était le suivant