Cinématique, interface et commande
Interface de téléopération
Un joystick miniature monté sur un de ses instruments permet au chirurgien de contrôler les mouvements du robot. Cette interface est simple, fiable, intuitive et répond rapidement aux commandes. Elle permet en outre des déplacements omnidirectionnels de l'image pour atteindre la cible en ligne droite, ce qui est plus naturel et efficace que de procéder par mouvements horizontaux et verticaux successifs. La vitesse peut être ajustée en temps réel en fonction de l'inclinaison du manche du joystick, pour réaliser des déplacements rapides en vue d'ensemble et des corrections précises en gros plan.
Choix du repère opérationnel
Le choix des coordonnées opérationnelles revêt une importance fondamentale pour la manipulation d'un laparoscope et l'ergonomie générale du dispositif. En effet, de ce choix va dépendre la correspondance entre l'idée que se fait le chirurgien de la direction souhaitée pour le mouvement, qu'il communiquera au robot à l'aide du joystick, et le déplacement réel de l'image induit par le manipulateur. En caricaturant, si l'image part en diagonale alors que le chirurgien veut un défilement vers la droite parallèlement aux bords horizontaux de l'écran, il y a fort à parier que l'usage du robot sera vite abandonné.
D'après les explications précédentes, il a été décidé de piloter les axes des deux pivots passifs 16 et 17 situés entre le bras et le manipulateur local (cf. Figure 5). L'axe 17 est toujours orthogonal au laparoscope et, par conséquence, parallèle aux bords verticaux du capteur de la caméra. Les mouvements gauche-droite du laparoscope autour de cet axe – plus exactement d'un axe parallèle à celui-ci et passant par l'incision – induisent donc toujours un déplacement de l'image parallèlement aux bords horizontaux du moniteur.
Quant à l'axe 16, son orientation est constante par rapport au repère fixe lié au manipulateur principal, puisque le bras ne fait qu'être translaté sans subir aucune rotation comme expliqué précédemment. Lorsque le laparoscope est perpendiculaire à cet axe (en configuration de référence choisie au milieu de l'espace de travail intra-abdominal requis pour l'opération), les mouvements verticaux de l'image sont eux aussi correctement exécutés. Cependant, quand l'angle du laparoscope avec l'axe 16 fixe diminue suite à un mouvement vers la gauche ou la droite qui l'éloigne du plan médian, le mouvement de l'image n'est plus purement vertical mais comporte une composante de rotation propre dont l'effet est de plus en plus marqué à mesure que le laparoscope s'éloigne du plan médian.
Malgré cet effet a priori gênant, il a été démontré expérimentalement que ce choix de coordonnées opérationnelles est pertinent, pour trois raisons.
Premièrement, il se contente de 2 moteurs pour générer les déplacements angulaires du laparoscope tout en offrant des performances comparables à celles du robot AESOP, qui dispose d'un moteur supplémentaires pour contrôler les 3 ddl d'orientation du laparoscope et peut donc faire pivoter celui-ci autour d'un axe instantané en permanence orthogonal au laparoscope.
Deuxièmement, il permet de maintenir une ligne d'horizon fixe alors qu'avec AESOP, il est possible de passer plusieurs fois par le même endroit dans l'espace de travail avec une orientation de l'image autour de l'axe du laparoscope différente. Pour comprendre ce phénomène, il suffit d'imaginer une personne située au Pôle Nord, tournée vers le méridien de Greenwich et regardant vers le centre de la terre (sous ses pieds). Si celle-ci marche tout droit jusqu'à l'équateur, puis se déplace latéralement (comme un crabe) le long de l'équateur pour se retrouver en Amérique Centrale et remonte enfin au Pôle Nord à reculons suivant un autre méridien, elle reviendra à son point de départ mais, faisant à présent face à un méridien outre-Atlantique, elle verra la terre sous ses pieds sous un autre angle. Ce phénomène peut s'avérer très perturbant pour le chirurgien, comme démontré dans l'étude 040 An ergonomic analysis of the effects of camera rotation on laparoscopic performance. En effet, si au départ les instruments de chirurgie « entrent » dans l'écran par le bord inférieur de l'écran, une rotation du laparoscope autour de son axe propre suite à ce phénomène pourrait modifier cette vision proche de nos habitudes (les yeux entre les mains) et faire entrer les instruments par un bord latéral de l'image. Cela rend naturellement les gestes très complexes à exécuter.
Enfin, le pilotage est plus intuitif et performant qu'avec les systèmes tels que ViKY, EndoAssist, FreeHand etc. dont le comportement est très peu optimal lorsque le laparoscope s'approche de la verticale.
Les détails de cette étude comparative sont disponibles dans les documents 050 Experimental Comparison Of Kinematics And Control Interfaces For Laparoscope Positioners [pdf] et 051 Influence of Kinematics and Control Interfaces on the Performance of Laparoscope Positioners (unpublished) [pdf]. Des vidéos illustrant le comportement de ces trois cinématiques (EVOLAP, AESOP, et famille ViKY) sont disponibles dans la présentation 052 NCTAM2012_BHerman_presentation_V1 [ppt]. Cette étude démontre également l'intérêt de doter le chirurgien d'un interface permettant des mouvements plus complexes que de simples mouvements gauche-droite / haut-bas comme la commande vocale ou les casques à accéléromètres de EndoAssist et FreeHand.
Interface de téléopération
Un joystick miniature monté sur un de ses instruments permet au chirurgien de contrôler les mouvements du robot. Cette interface est simple, fiable, intuitive et répond rapidement aux commandes. Elle permet en outre des déplacements omnidirectionnels de l'image pour atteindre la cible en ligne droite, ce qui est plus naturel et efficace que de procéder par mouvements horizontaux et verticaux successifs.
La vitesse peut être ajustée en temps réel en fonction de l'inclinaison du manche du joystick, pour réaliser des déplacements rapides en vue d'ensemble et des corrections précises en gros plan.

Modes de fonctionnement
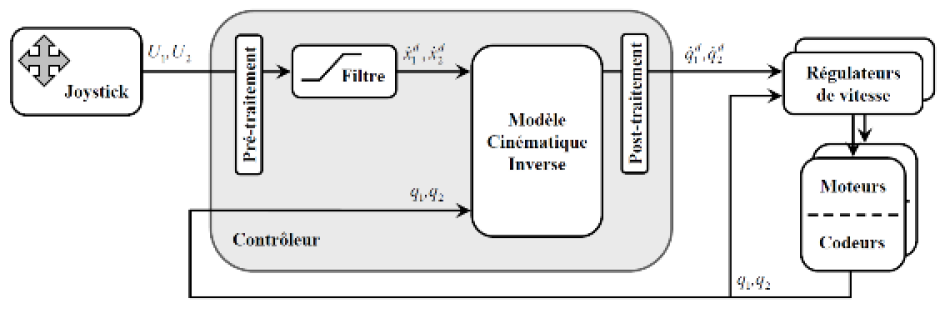
Le mode de fonctionnement privilégié est la téléopération du laparoscope à l'aide du joystick ou de tout autre interface. Comme le schématise la figure ci-dessous (qui n'illustre que le pilotage des mouvements angulaires du laparoscope, le mouvement de zoom par translation étant trivial), les consignes venant du joystick, définissant les vitesses opérationnelles, sont d'abord pré-traitées pour les calibrer automatiquement et définir une zone neutre afin d'éviter qu'un effleurement involontaire du joystick ne produise un mouvement inopiné. Ensuite, les signaux sont lissés par un filtre passe-bas (Butterworth du premier ordre) puis envoyés au modèle cinématique permettant, sur base de ces consignes opérationnelles et de la position angulaire courante des actionneurs, de calculer les consignes articulaires requises. Celles-ci sont enfin envoyées aux cartes électroniques réalisant la régulation de vitesse bas niveau de chaque moteur, en passant au préalable par un post-traitement permettant entre autres de modifier ces consignes lorsque le laparoscope est en bordure de l'espace de travail (physique ou restreint par software).
À côté de ce mode de fonctionnement principal téléopéré et du déplacement manuel de la caméra (par réversibilité, moteurs non alimentés), un mode automatique permet au chirurgien de revenir directement à une situation antérieure préalablement mémorisée. Il est ainsi possible, par exemple, de revenir en cours d'opération à une vue intra-abdominale générale centrée sur un organe depuis n'importe quelle situation du laparoscope. Ce mode utilise une planification de trajectoire de la configuration courante à la configuration mémorisée dans l'espace articulaire, ce qui permet d'éviter de passer par les configurations singulières du mécanisme. Cette planification utilise une loi Bang-Bang avec palier de vitesse (loi trapèze) et synchronisation des articulations, dont les accélérations en échelon ont été remplacées par un polynôme du second degré pour obtenir une accélération continue et générer moins de vibrations. Tous les détails de ce mode sont décrits dans la section 8.2.2 de la thèse.
L'algorithme de contrôle a été implémenté sous forme d'un schéma-bloc dans Matlab/Simulink et est compilé puis exécuté en temps-réel sur un ordinateur équipé d'une carte dSPACE DS1102 dotée d'un microcontrôleur et d'entrées et sorties digitales et analogiques. Ce superviseur scrute à fréquence fixe (100Hz) les entrées (codeurs et capteurs de fin de course, interface de commande) et envoie en sortie les consignes instantanées de vitesse à chacun des régulateurs de vitesse bas niveau qui pilotent ensuite les moteurs. Un tableau de bord virtuel a également été implémenté dans dSPACE Control Desk, pour pouvoir afficher l'état du robot et des différents capteurs (physiques ou logiciels), de choisir le mode de fonctionnement, et de régler en ligne certains paramètres du schéma de commande.