La chirurgie laparoscopique
Principe de la chirurgie laparoscopique
La technique chirurgicale mini-invasive de diagnostic et d'intervention est en pleine expansion dans les salles d'opération. Elle tend aujourd'hui à s'imposer dans toutes les disciplines de la chirurgie abdominale : gynécologique,urologique, générale et digestive.
À l'inverse de la chirurgie classique laparotomique, qui nécessite une ouverture dans la paroi abdominale pour accéder directement aux organes, le chirurgien qui opère par voie laparoscopique — dite encore cœlioscopique —ne pratique que de petites incisions, dont la taille dépasse rarement 10 mm.
Le chirurgien insère à travers ces incisions de longs instruments, tels des pinces,des dissecteurs ou des ciseaux, au travers de trocarts qui évitent de blesser la paroi abdominale par frottement.
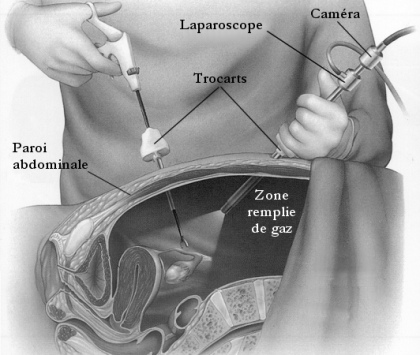
Du CO2 réchauffé et humidifié est insufflé sous pression dans la cavité abdominale par un des trocarts pour distendre la paroi et créer un espace de travail intra-abdominal suffisant. Le chirurgien n'ayant aucun contact visuel direct avec l'intérieur de l'abdomen, un moniteur retransmet les images provenant d'une caméra miniature, placée à l'extrémité proximale (la plus proche du chirurgien) d'un instrument optique appelé laparoscope.
L'intérêt réel de la procédure minimalement invasive sur son homologue classique dépend en effet très fortement du type d'intervention. Ainsi, la cholécystectomie (ablation de la vésicule biliaire), la cure des hernies de la paroi abdominale, la sigmoïdectomie (résection de la partie terminale du gros intestin), ou encore le traitement de l'endométriose (présence de tissu utérin, en dehors de la cavité utérine), sont des indications pour lesquelles la laparoscopie a démontré sa supériorité globale par rapport à toute autre voie d'abord chirurgical. Cependant, de nombreuses études ont montré que cette technique pose des problèmes en termes d'ergonomie.
Complément :
Le terme « trocart » désigne normalement l'outil tranchant qui sert à inciser les couches internes de la paroi abdominale - les tissus adipeux (graisse), les muscles et le péritoine, sac inextensible renfermant tous les organes intra-abdominaux. Il est entouré d'une canule qui reste en place après l'incision,et qui est elle-même appelée « trocart » par abus de langage.
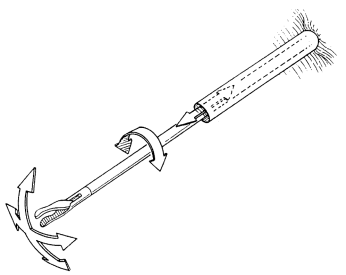
Constitution du laparoscope
Le laparoscope est un type d'endoscope (pour « regarder à l'intérieur ») rigide, contrairement aux endoscopes souples qui sont insérés dans le corps via ses orifices naturels. Il est composé de deux tubes concentriques en acier inoxydable. Le tube intérieur renferme une série de lentilles fixes qui acheminement les images intra-abdominales de l'extrémité distale (la plus distante du chirurgien) située dans la cavité abdominale à l'extrémité proximale pour les focaliser sur le capteur de la caméra. Un faisceau de fibres optiques disposé entre les deux tubes est connecté à une source de lumière froide qui éclaire la cavité abdominale. Un exemple est présenté ci-contre. La lentille distale peut être dans l'axe du laparoscope (angle de vision à 0°) ou être inclinée (classiquement de 15, 20, 30, 45 voire 60°) pour permettre de voir derrière certains organes sans devoir déplacer le point d'entrée du laparoscope en cours d'opération. Les laparoscopes les plus récents peuvent offrir une vision stéréoscopique (avec une caméra et un moniteur 3D) ou disposer d'une extrémité distale béquillable, mais ces innovations restent très marginales.

Avantages pour les patients
Grâce notamment à la réduction importante de la taille des incisions, la chirurgie réalisée par voie laparoscopique présente plusieurs avantages importants pour le patient.
Les premiers sont de nature clinique. La diminution de « l'agression » chirurgicale sur le corps du patient a pour premier effet la réduction de la douleur post-opératoire.
Ensuite, les incisions étant des portes d'entrée faciles pour les micro-organismes indésirables, la laparoscopie diminue sensiblement le risque infectieux. Il y a également moins de risques de complications pariétales, telles que les abcès de la paroi, les éviscérations ou les éventrations. Enfin, la surpression intra-abdominale peut suffire à arrêter le saignement de petits vaisseaux par compression.
La chirurgie laparoscopique, et de manière générale la chirurgie minimalement invasive, présente également des intérêts socio-économiques, tant pour le patient que pour la sécurité sociale. Grâce à la cicatrisation plus rapide des tissus de la paroi abdominale et à la réduction de la douleur, la durée d'hospitalisation est souvent plus courte qu'en cas de chirurgie classique. Outre la diminution des coûts liés à l'hospitalisation en elle-même, le patient peut retourner plus rapidement à la vie active.
Enfin, les avantages esthétiques sont indéniables. Il est généralement admis que les cicatrices laissées par des incisions inférieures à 10 mm disparaissent après quelques années.
Difficultés pour les chirurgiens
Si cette nouvelle technique offre de nombreux avantages au patient, elle complique sensiblement la tâche de l'équipe médicale et en particulier du chirurgien.
Tout d'abord, les instruments de laparoscopie sont loin d'offrir la dextérité des doigts d'un chirurgien. La paroi abdominale distendue par le gaz sous pression est relativement rigide — on parle de rigidité pariétale — et l'incision agit comme une liaison qui contraint les mouvements de l'instrument. L'extrémité distale de celui-ci n'a plus que 4 degrés de liberté (ddl) : une translation suivant l'axe longitudinal de l'instrument, guidée par la canule, une rotation autour de ce même axe, et deux rotations autour de l'incision. La mobilité intra-abdominale est donc fortement réduite.
En outre,les incisions inversent les mouvements angulaires : si le chirurgien déplace sa main vers la droite, l'extrémité distale de l'instrument ira vers la gauche. Si cela n'est pas gênant pour des mouvements simples tels que le déplacement point-à-point, il a été montré que cela ralentissait considérablement les tâches plus complexes, telles que la suture, qui combinent des mouvements inversés (rotations autour de l'incision) et non-inversés (translation et rotation autour de l'axe) avec deux instruments et demandent beaucoup d'entraînement.
Par ailleurs, une des différences ergonomiques majeures par rapport à la chirurgie classique, est que le retour des informations au chirurgien est indirect.
D'une part, la perception tactile est fortement perturbée par divers facteurs. L'absence de contact direct avec les tissus et la friction dans les instruments rendent quasi impossible la localisation par palpation de vaisseaux entourés de graisse ou de tumeurs plus profondes. La friction dans le trocart, équipé d'un joint d'étanchéité pour maintenir la surpression intra-abdominale, et l'effet de levier variable causé par l'incision, altèrent quant à eux l'évaluation des efforts de contact et de traction des tissus compliants.
D'autre part, la perception visuelle est également dégradée. L'affichage 2D monoscopique, la distorsion optique de l'image (effet fish-eye) et le mésalignement entre les axes de la caméra, de l'écran, du regard et des instruments rendent plus difficile la modélisation mentale de la profondeur, et par conséquent la localisation des instruments et des cibles. Cela perturbe la coordination main-oeil et rend les gestes chirurgicaux plus lents et moins précis.
Enfin, puisque le chirurgien a besoin de ses deux mains pour tenir des instruments, la manipulation de la caméra est généralement confiée à un assistant. Le chirurgien n'a par conséquent plus le contrôle direct de sa vision, et une nouvelle source d'interférences apparaît entre le patient et lui, ce qui pose une autre série de problèmes.
Toutes ces perturbations d'ordre ergonomique compliquent donc singulièrement la tâche du chirurgien, requièrent plus d'attention et de concentration,et contre-balancent les effets bénéfiques pour le patient de la chirurgie mini-invasive.
La solution à ces problèmes, liés principalement à l'interface homme-machine, passe certainement par l'optimisation des outils de la laparoscopie actuels et la conception de nouveaux dispositifs :
instruments articulés pour restaurer une part de la mobilité intra-abdominale,
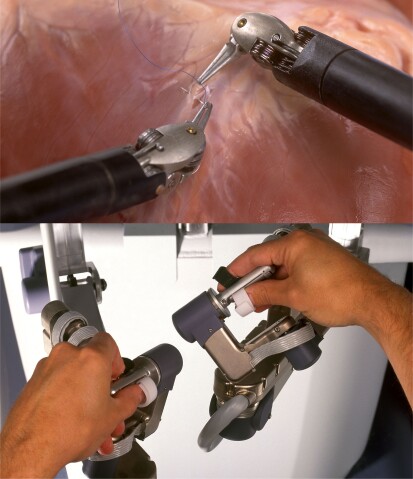
systèmes de téléopération pour rendre les gestes plus naturels et améliorer la perception sensorimotrice, comme le système da Vinci d'Intuitive Surgical,
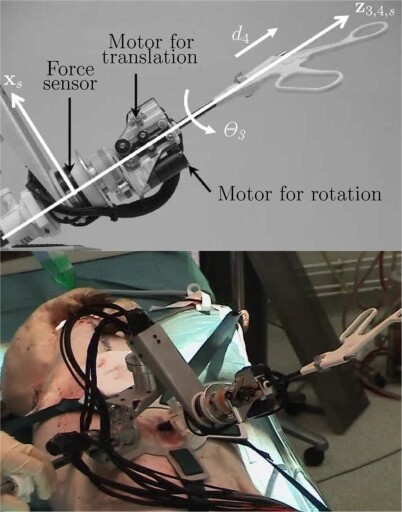
robots à retour d'effort pour restaurer la perception haptique, comme le robot MC2E,
dispositifs de vision stéréoscopique pour recréer la troisième dimension,
ou encore des porte-endoscopes pour libérer l'assistant de cette tâche et rendre le contrôle de l'image au chirurgien. C'est de cette dernière famille de dispositifs dont fait partie le robot EVOLAP objet de l'étude.
Complément :
Depuis l'apparition des premiers systèmes robotisés d'assistance à la chirurgie dans les années 1980, le nombre d'applications est en constante expansion, de même que la diversité des dispositifs. Un aperçu de l'historique des robots chirurgicaux, de leurs propriétés et de l'évolution des systèmes pour la laparoscopie est proposé dans le support de cours La robotique pour le chirurgien [ppt]. Les articles scientifiques Medical Robotics in Computer-Integrated Surgery 2003 [pdf] et Current Capabilities and Development Potential in Surgical Robotics 2015 [pdf] offrent quant à eux un tour d'horizon plus vaste des systèmes d'assistance pour d'autres disciplines chirurgicales telles que l'orthopédie, la neurochirurgie, la microchirurgie, la radiothérapie, les biopsies etc.