Manipulateurs de laparoscope
Problèmes liés à la manipulation du laparoscope

La manipulation manuelle du laparoscope par un second chirurgien, souvent un interne en cours d'apprentissage de la chirurgie, entraîne une série de problèmes.
La nécessité d'une troisième main en chirurgie laparoscopique rend impossible les opérations en solo, au contraire de la chirurgie classique dans certains cas précis.
Il a par ailleurs été montré que la perception de la profondeur, déjà difficile en l'absence de vision stéréoscopique directe, était encore réduite lorsque les déplacements de la caméra ne sont pas effectués par le chirurgien lui-même. En effet, lorsque l'on regarde l'écran en déplaçant soi-même la caméra, on crée une corrélation entre les informations spatiales renvoyées par les chaînes motrices du bras et les images reçues, ce qui permet de recréer une partie de l'information de profondeur manquante. Cette information motrice n'est bien évidemment pas disponible lorsque la caméra est manipulée par quelqu'un d'autre.
En outre, la différence entre l'action demandée parle chirurgien (par exemple, « aller à gauche ») et sa réalisation par l'assistant (qui va produire un déplacement légèrement différent de celui escompté) peut également induire de la confusion dans la modélisation mentale de l'espace de travail par le chirurgien. Comme nous l'avons vu précédemment, cela perturbe la coordination main-oeil et complique les déplacements des instruments vers une cible ainsi que les gestes chirurgicaux délicats.
La capacité de l'assistant à anticiper les déplacements de la caméra en cours d'intervention n'est pas toujours optimale et des problèmes de communication peuvent survenir lorsque l'équipe chirurgicale n'est pas rodée. Ce manque de compréhension et de coordination conduit parfois à des déplacements involontaires de l'image intra-abdominale, néfastes au déroulement de l'opération.
En outre, porter la caméra à bout de bras peut devenir fatigant si l'opération est longue et, après un certain temps, l'image commence à trembler. Cette instabilité relève encore le niveau de difficulté de gestes précis tels que la suture ou la dissection fine. Il n'est pas rare non plus que l'assistant qui tient la caméra (à droite sur la figure) utilise également un instrument chirurgical — la plupart du temps une pince ou la canule d'irrigation et aspiration. En se concentrant sur la tâche à effectuer avec cet instrument, il porte moins d'attention à la manipulation de la caméra qui peut partir dans une lente dérive, pouvant même toucher par inadvertance un organe et se souiller. Il faut dès lors interrompre l'intervention quelques instants pour rincer la lentille.
Enfin, en règle générale, il n'y a jamais trop d'espace dans une salle d'opération, et en particulier autour de la table. Dans certains cas, la présence même de l'assistant peut gêner les mouvements du chirurgien, notamment lorsqu'ils sont tous deux du même côté du patient. Ces quelques exemples montrent que la manipulation manuelle de la caméra est à l'origine de bon nombre de problèmes d'ordre ergonomique. Cet inconfort perturbe la concentration du chirurgien et complique encore les gestes opératoires, déjà plus difficiles de parla nature même de l'abord mini-invasif. Pour tenter de remédier à ces inconvénients, des dispositifs porte-endoscopes passifs et actifs ont été développés et se sont immiscés en salle d'opération au cours des quinze dernières années.
Avantages des porte-laparoscopes
Plusieurs avantages sont généralement mis en avant :
l'image intra-abdominale est nettement plus stable, ce qui rend plus aisés les gestes délicats tels que la suture ;
le positionnement de la caméra est plus précis ;
le nombre de déplacements du laparoscope en cours d'opération est réduit de moitié, ce qui est souvent expliqué par l'accroissement de la précision ;
les contacts de la lentille distale avec les tissus sont moins fréquents, diminuant le nombre de nettoyages nécessaires ;
le chirurgien ne doit pas guider l'assistant et peut, par conséquent, mieux se concentrer sur l'intervention ;
un assistant qui doit tenir un instrument peut se focaliser exclusivement sur sa tâche chirurgicale ;
et enfin, dans certains cas, l'usage d'un tel dispositif d'assistance permet à un chirurgien d'opérer seul.
Porte-endoscopes passifs
Un porte-endoscope (et porte-instrument) passif est constitué de barres connectées par des articulations blocables. Sa base est fixée à un des rails latéraux dont sont pourvues les tables d'opération.
Le laparoscope est supporté par son extrémité et le chirurgien peut le déplacer au cours de l'opération après avoir relâché les articulations du bras. Certains dispositifs, comme le Martin Arm, sont simplement équipés d'articulations blocables une à une à l'aide de vis.

D'autres recourent à une commande pneumatique centralisée qui relâche toutes les articulations en même temps, tels le Low ProfileScope Holder de Kronner Medical Mfg. (Roseburg, USA), ou l'Endoboy deGeyser-Endobloc (Coudes, France).
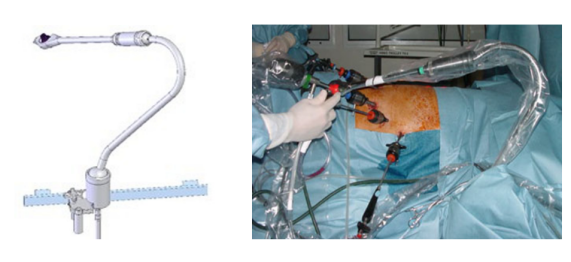
Le poignet porte-endoscope à rotule Endo Freeze, distribué par B. Braun Aesculap (Tuttlingen, Allemagne), se monte à l'extrémité d'un bras passif (comme Layla ou Unitrac, du même fabricant) et utilise quant à lui une friction ajustable sur la rotule en fonction du poids de l'instrument ou du laparoscope porté.
Ce dernier principe se retrouve également combiné à un équilibrage statique sur le PASSIST de l'Academic Medical Center (Amsterdam, Pays-Bas). Enfin, l'Automatic camera holding system, développé au Helmholtz Institute for Biomedical Engineering (Aachen, Allemagne), utilise des actionneurs piézoélectriques en guise de freins sur les articulations.

Avantages
Ces systèmes passifs sont avant tout compacts et restreignent très peu les mouvements du chirurgien. Ils sont rapidement installés et retirés de la table et n'allongent donc pas la durée opératoire. Leur simplicité de fonctionnement les rend intuitifs à utiliser. En outre, ils garantissent une image stable pour un prix d'achat raisonnable. Enfin, comme expliqué précédemment, le chirurgien manipule lui-même la caméra, ce qui lui permet de retrouver quelques impressions de profondeur.
Inconvénients
Pour manipuler lui-même la caméra, le chirurgien libère une de ses mains. Il doit donc lâcher un instrument pour saisir le laparoscope et, pour des raisons évidentes de sécurité, il doit au préalable retirer cet instrument du trocart.
En outre, les dispositifs équipés d'articulations à blocage indépendant demandent un certain temps de manipulation et nécessitent l'emploi des deux mains. Chaque déplacement de la caméra interrompt la concentration du chirurgien et perturbe à la longue la fluidité du déroulement de l'opération. Cela amène à dire que ces bras passifs sont peut-être plus aptes à maintenir un instrument statique durant la majeure partie de l'opération, comme un rétracteur, qu'à permettre des déplacements fréquents de la caméra.
Porte-endoscopes passifs
Les porte-endoscopes actifs apportent des solutions aux limitations de leurs homologues passifs. Certaines de leurs articulations sont motorisées, et non plus simplement freinées, si bien que le chirurgien « n'a plus qu'à » indiquer au robot où aller grâce à une interface de commande spécifique, sans devoir lâcher un instrument.
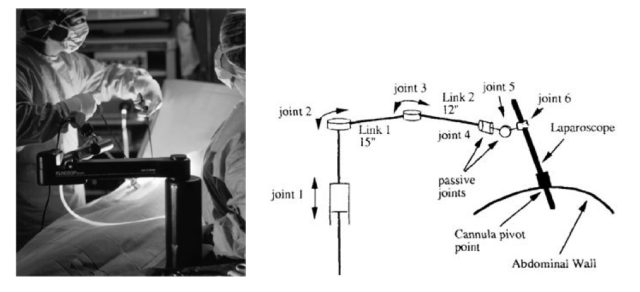
L'AESOP fut le premier robot porte-endoscope mis sur le marché au milieu des années 90 par Computer Motion Inc. (Goleta, USA), société à présent fusionnée avec Intuitive Surgical Inc. qui a cessé la vente du robot. Comme on le voit sur la figure, son bras articulé possède une architecture série de type scara à 3ddl commandés, constituée d'une articulation prismatique verticale suivie de deux pivots d'axes verticaux, portant les numéros 1 à 3. Son poignet est constitué de trois pivots concourants 4 à 6, dont seul le dernier, aligné avec le laparoscope, est motorisé. L'effecteur du poignet porte le laparoscope juste sous la caméra. On parle de robot à poignet passif, car seuls 4ddl sont contrôlés de manière active, les deux derniers étant imposés par la contrainte de passage dans l'incision. Ces 4 moteurs permettent de faire pivoter le laparoscope autour d'un axe quelconque pour les déplacements latéraux de l'image et le translater suivant son axe pour le mouvement de zoom.
Pour être précis, ajoutons que les 4ddl ne sont en fait pas tous commandés directement par le chirurgien : la rotation du laparoscope autour de son axe propre est calculée automatiquement, en fonction de la configuration instantanée du laparoscope, pour pouvoir faire pivoter celui-ci autour d'un axe quelconque.
L'AESOP est fixé sur un rail latéral de la table d'opération mais, sa masse avoisinant les 25 kg, il doit y être amené à l'aide d'un chariot. La première version du robot utilisait un footpad, une sorte de joystick posé au sol et actionné au pied, mais dans la dernière version, les mouvements de la caméra sont ordonnés par la voix, au moyen de commandes simples comme Left, Down ou Zoom out.
Peu après sont arrivés deux concurrents : l'EndoAssist (Armstrong Heal-thcare Ltd., Loudwater, Royaume-Uni, devenu Prosurgics Ltd., Bracknell,Royaume-Uni) et le LapMan (Medsyssa, Gembloux, Belgique).
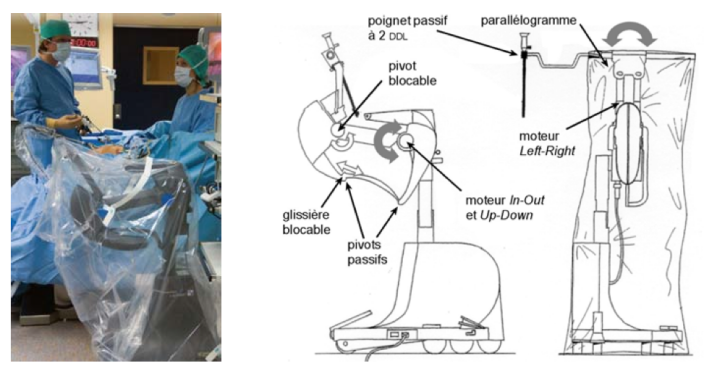
L'EndoAssist est un robot série dont l'architecture à 4ddl possède un axe de rotation intrinsèque (ou axe de rotation déporté, ou encore axe goniométrique) qui doit être aligné avec l'incision, avec l'aide de pointeurs laser. Les déplacements latéraux (Left–Right) sont obtenus par rotation du laparoscope autour de cet axe goniométrique, tandis que les déplacements verticaux (Up–Down) et longitudinaux (In–Out) sont obtenus par combinaison de la translation de la potence et de l'angulation de la barre terminale du robot, à laquelle est fixée le laparoscope via un pivot passif.
À la différence de l'AESOP, la rotation du laparoscope autour de son axe est bloquée en usage normal, et n'est contrôlée par le chirurgien que s'il emploie un laparoscope à optique oblique. Une autre différence importante est que le robot n'est pas monté sur la table, mais simplement posé au sol. L'interface de commande est un casque comportant des accéléromètres. Lorsque le chirurgien appuie sur une pédale, toute accélération de la tête enclenche un déplacement de l'image dans la direction correspondante. Le mouvement prend fin en relâchant la pédale.

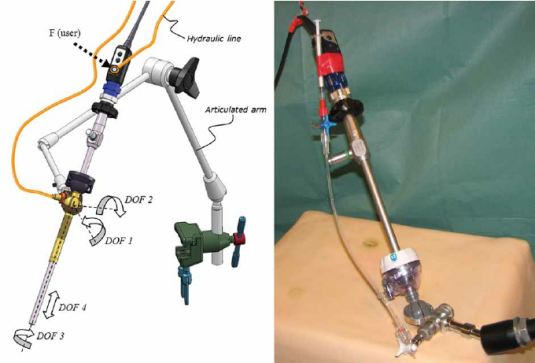
Le LapMan utilise également une architecture découplée à axe goniométrique (aligné sur l'incision avec un laser), avec un poignet passif à l'extrémité du bras.
Il n'offre que 3ddl, la rotation du laparoscope autour de son axe propre étant toujours bloquée mécaniquement. La particularité de ce robot est qu'il ne possède que 2 moteurs. Un premier déforme un parallélogramme, qui induit les mouvements Left–Right. Le second moteur actionne un mécanisme plan à 4 barres, reliées deux à deux par quatre pivots dont un placé sur une glissière. Le moteur est placé sur un des pivots et des freins électromagnétiques peuvent bloquer soit la glissière, soit un autre pivot.
Dans le premier cas, une rotation du moteur provoquera un mouvement In–Out et, dans le second, un mouvement Up–Down. Le LapMan est posé au sol et se commande à l'aide d'un joystick miniature sans fil fixé sur un des instruments et actionné avec l'index. Cette interface remplace une télécommande à 6 boutons qui se logeait dans la paume de la main, sous le gant stérile.

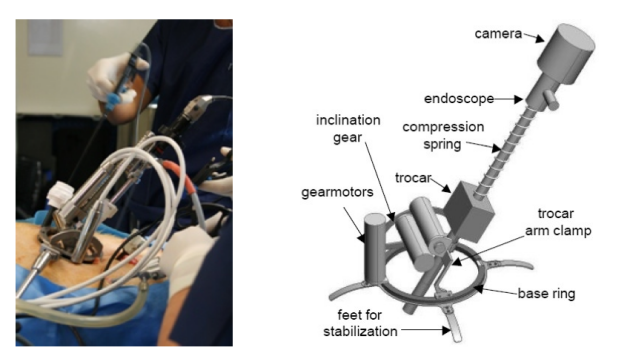
Une dizaine d'années après ces trois pionniers, issus de développements réalisés dans l'industrie, le premier robot porte-endoscope conçu dans le monde académique les a rejoints sur le marché. Il s'agit du ViKY (Endocontrol Medical, Grenoble, France), la version commerciale du Light Endoscope Robot(LER) développé par l'équipe Gestes Médico-Chirurgicaux Assistés par Ordinateur du Laboratoire timc (Université Joseph Fournier, Grenoble, France) et le chu de Grenoble. La différence principale par rapport à ses prédécesseurs est qu'il est très compact et ne pèse que 1 kg environ. La première version était simplement posée sur l'abdomen du patient, autour du trocart, et sanglée à la table ; pour des raisons de stabilité, les prototypes suivants et la version finale recourent à un bras articulé blocable fixé sur rail latéral de la table.
Il est entièrement stérilisable par autoclave, alors que les robots décrits précédemment doivent être recouverts d'un drap plastique stérile. Sa cinématique série à 3ddl est très simple, chaque moteur correspondant directement à un mouvement du laparoscope.
Deux interfaces de commande sont actuellement disponibles : une commande vocale et un footpad. Une commande de positionnement semi-automatique par localisation en temps réel d'un des instruments chirurgicaux serait en cours de développement.
D'autres prototypes ont également été conçus dans des entreprises privées ou des centres de recherche. Le Naviot, développé par Hitachi Ltd. (Tokyo,Japon) avec le Department of Precision Machinery Engineering de la University of Tokyo inclut un système de vidéoscopie complet (laparoscope et caméra) à zoom optique. Il est contrôlé par un joystick miniature placé sur l'instrument. Bien que ses débattements angulaires faibles le dédient principalement à la thoracoscopie, il a également été testé cliniquement en laparoscopie dans une série de cholécystectomies.
Le FIPSEndoarm du Karlsruhe Research Institute (Allemagne) a fait l'objet d'évaluations pré-cliniques mais n'a jamais été commercialisé.
Le Laparocision est un dispositif en deux parties : un porteur stérilisable à axe goniométrique, qui contrôle les déplacements angulaires de la caméra et un zoom local à usage unique, placé à l'extrémité du porteur, qui translate le laparoscope à l'aide de galets. GMP Surgical Solutions Inc.(Fort Lauderdale, USA) a obtenu l'approbation de la FDA pour la mise sur le marché américain, mais le Laparocision n'a jamais été commercialisé.

Limitations des systèmes actuels
Tous les systèmes cités ci-dessus remplissent leurs fonctions principales, à savoir maintenir le laparoscope stable et immobile durant l'opération, et le déplacer lorsque le chirurgien le souhaite. Ils souffrent cependant d'un certain nombre de désavantages.
Premièrement, les porte-endoscopes actifs sont souvent plus lourds et volumineux que les passifs, surtout s'ils sont posés au sol, car leur poids conséquent et leur large empreinte sont nécessaires pour garantir leur stabilité. Cela les rend difficiles à déplacer dans la salle d'opération, qui est généralement plus exiguë et encombrée que sur les photos publicitaires des firmes qui distribuent ces robots.
En outre, leur encombrement général aux abords de la table d'opération peut être gênant pour l'équipe chirurgicale.
Ensuite, comme nous l'avons vu plus haut, la plupart des robots ont une architecture à axe ou centre de rotation déporté, qui nécessite un alignement parfait avec l'incision pour garantir des déplacements d'image conformes à l'ordre du chirurgien. Il en va même de la sécurité du patient lorsqu'il s'agit d'un centre de rotation imposé avec contrôle des 6ddl du laparoscope, car un mésalignement de l'incision avec ce centre de rotation ou un mouvement brusque du patient pourrait induire de dangereux efforts dans la paroi abdominale. Cela a pour conséquence une restriction importante sur la liberté de positionnement de l'équipe, puisque le placement correct et précis du robot est essentiel.
De plus, les manipulations préliminaires pour l'installer et l'aligner correctement allongent la durée globale de l'intervention. Enfin, il n'est pas rare que l'on ajuste la hauteur ou l'inclinaison de la table en cours d'opération. Dans ce cas,il faut à nouveau réaligner le robot, sauf s'il est fixé sur la table.Par ailleurs, les mouvements du laparoscope induits par les robots actuels sont assez basiques.
A cause de leur structure électromécanique et de l'emploi d'interfaces de commande de type « tout ou rien », les déplacements se font le plus souvent à vitesse fixe, avec au mieux une rampe d'accélération et de décélération prédéterminée. Cette vitesse résulte d'un compromis entre les vues d'ensemble qui nécessitent de couvrir rapidement de grandes portions angulaires, et les plans rapprochés qui requièrent des ajustements angulaires lents et précis. Pour des raisons de sécurité, la vitesse choisie par les fabricants est généralement faible, afin éviter tout risque de blessure lorsque le laparoscope est proche des organes (en plan rapproché), ce qui rend les longs déplacements fastidieux.
De même, les déplacements doivent être décomposés en une succession d'ordres simples comme Up–Down, Left–Right, et In–Out, sans possibilité de se déplacer en oblique dans l'image pour atteindre directement la destination en « ligne droite » sur l'écran.
Enfin, outre leur encombrement statique dû à leur taille, l'espace balayé parleurs parties mobiles est souvent assez large, pour un volume de travail intra-abdominal relativement restreint. Cela est vrai pour les robots qui génèrent les déplacements angulaires et linéaires de manière couplée. Par exemple, une translation du laparoscope dans le trocart requiert un mouvement du bras entier d'AESOP, par l'action combinée des trois moteurs du bras. À l'inverse, le ViKY et le Laparocison produisent un mouvement de zoom par le seul moteur terminal sans mouvement macroscopique du robot, ce qui les rend nettement moins envahissants et minimise le risque de gêner le chirurgien dans ses gestes chirurgicaux.
Ainsi, bien que les robots porte-endoscopes soient a priori conçus pour améliorer l'ergonomie générale de la chirurgie laparoscopique, leurs nombreuses faiblesses et leur prix relativement élevé face aux passifs, tendent à freiner leur diffusion dans les centres hospitaliers.
De nouveaux dispositifs sont apparus dans les dix dernières années, tels le KaLAR du Korea Advanced Institute of Science and Tech-nology (Daedeok Science Town, République de Corée) composé d'un porteur passif, d'un poignet à arc goniométrique, et d'un laparoscope spécifique dont l'extrémité distale est également orientable ; le P-arm du Department of Mechanical Science and Bioengineering de la Osaka University (Japon) à usage unique, qui utilise des actionneurs hydrauliques ; ou encore eHands Free Navigation System que le chirurgien porte sur son torse avec un harnais, pour contrôler avec son corps l'orientation du laparoscope. Deux nouveaux robots commerciaux sont également apparus en 2008 : le SoloAssist d'AKTORmed GmBH (Barbing, Allemagne), et le FreeHand, de Prosurgics Ltd. (Bracknell, Royaume-Uni), qui reprend l'interface d'EndoAssist, son prédécesseur, mais dont l'architecture est entièrement nouvelle.