Menu Pilotage
Présentation
Le menu est accessible depuis le menu principal par l'icône  ou bien directement depuis le menu Acquisition (même icône).
ou bien directement depuis le menu Acquisition (même icône).
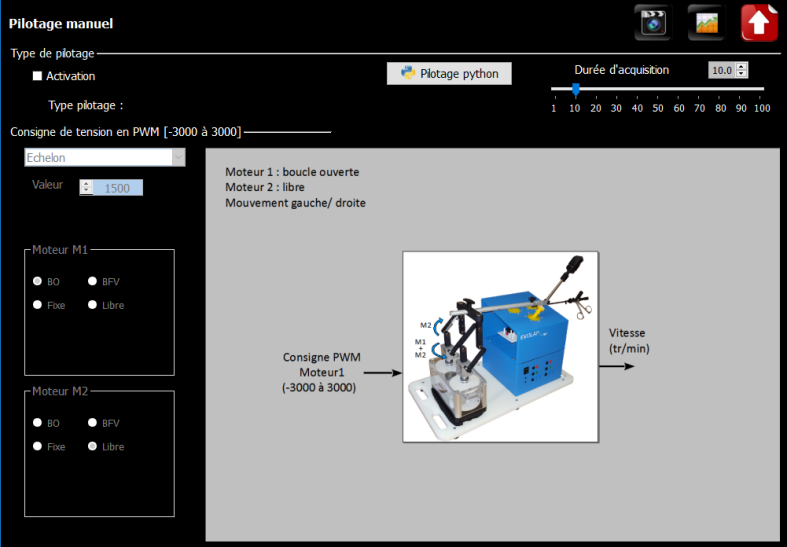
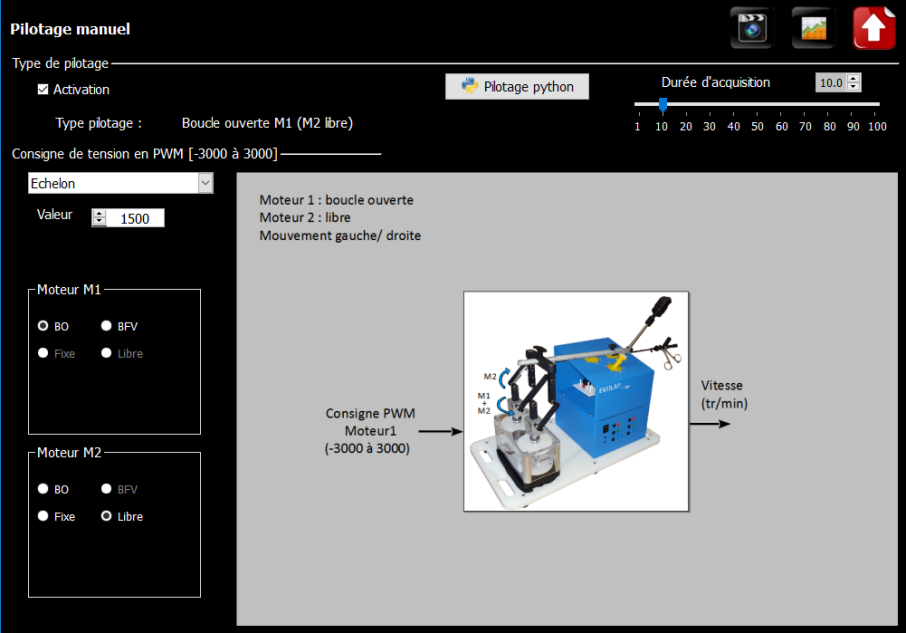
On peut accéder aux sous-menus uniquement si Activation est coché.
Le bouton  permet de revenir directement au menu Acquisition sans passer par le menu principal et ainsi pouvoir lancer l'acquisition et le pilotage en même temps.
permet de revenir directement au menu Acquisition sans passer par le menu principal et ainsi pouvoir lancer l'acquisition et le pilotage en même temps.
Le bouton  permet de revenir au menu principal.
permet de revenir au menu principal.
Consigne
L'utilisateur peut choisir une consigne en échelon envoyée soit directement au moteur soit comme consigne de l'asservissement de vitesse.
Les unités sont rappelées en fonction du type de pilotage choisi.
Types de pilotage
Différents types de pilotage sont à choisir en cochant pour chaque moteur le mode retenu :
Boucle ouverte BO
Boucle fermée en vitesse BFV
Fixe (asservissement de position nulle)
Libre (moteur non alimenté)
Des schémas-blocs apparaissent automatiquement en fonction du type de pilotage demandé et renseignent sur la structure du pilotage.
Toutes les combinaisons ne peuvent pas être sélectionnées. Des informations visuelles renseignent sur le type de mouvement.
Menu Pilotage Python
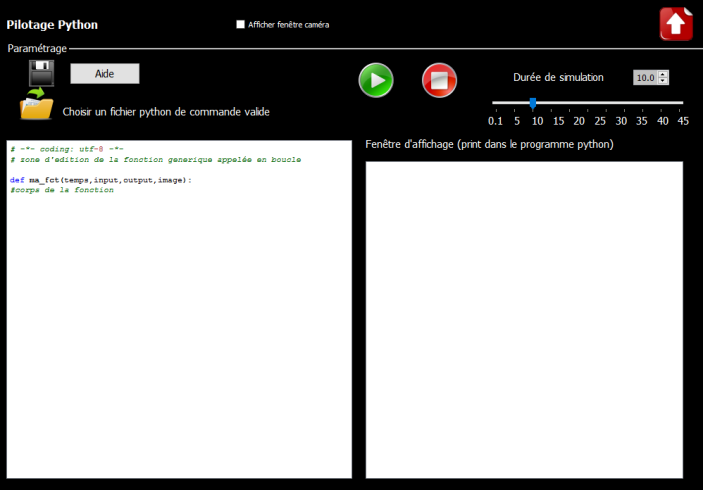
En cliquant sur le bouton ![]() , on rentre dans un mode qui permet de tester une commande écrite en python.
, on rentre dans un mode qui permet de tester une commande écrite en python.
Ce mode est basé sur la syntaxe de la librairie Py2duino mais ne nécessite pas de déclarer les variables correspondant aux moteurs ou aux capteurs.
Une zone d'aide permet d'informer sur la syntaxe et le nom de la fonction à renseigner.
La zone blanche est une zone de débogage qui affichera les print renseignés dans le programme Python utilisateur.
Sélectionner un fichier python contenant la fonction ma_fct à l'aide de l'icône 
Puis choisir une durée de simulation et la lancer en cliquant sur le bouton ![]() . Vous pouvez la stopper à tout moment
. Vous pouvez la stopper à tout moment
Des exemples de fichiers python sont disponibles dans le répertoire par défaut exemples_python. Vous pouvez les copier et les ouvrir avec n'importe quel éditeur python.