Forme de l'équation différentielle
Définition : Forme de l'équation différentielle
La forme générale de l'équation différentielle caractéristique d'un système du premier ordre est :
avec :
\(\tau\) la constante de temps du système (en secondes)
\(K\) le gain statique du système (unité [s]/[e])
\(\tau\ \frac{d \ s(t)}{dt}\) est bien homogène à \(s(t)\) car \(\tau\) en seconde "compense" la division par \(dt\).
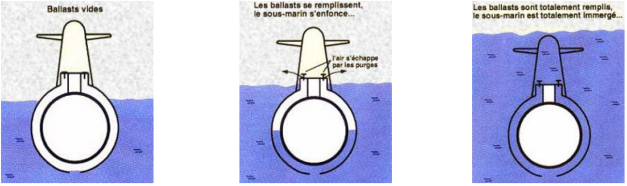
Exemple : Sous-marin
Pour s'immerger ou remonter à la surface, les sous-marins utilisent des ballasts qui peuvent être plus ou moins remplis d'eau ou d'air. La poussée d’Archimède est alors modifiée et permet de ne plus s'opposer au poids du sous-marin et ainsi de gérer le déplacement vertical du sous-marin.
Le principe fondamental de la dynamique appliqué au sous-marin soumis à la poussée d'Archimède, à la pesanteur et aux frottements visqueux de l'eau, s'écrit :
On pose \(P(t) = Pa(t) -mg\) la force permettant de gérer la vitesse verticale du sous-marin. On obtient alors une équation différentielle du premier ordre entre l'entrée \(P(t)\) et la sortie \(v(t)\) :
Nous pouvons ainsi définir la constante de temps du système \(\tau=\frac{m}{f}\) et le gain \(K =\frac{1}{f}\).
Exemple : Chauffage d'une pièce
Le comportement d'une pièce chauffée dont les murs sont mal isolés peut être décrit par les équations suivantes :
équation de la chaleur du système pièce : \(C\ \frac{dT(t)}{dt}=P_{recue}(t)-P_{perdue}(t)\)
puissance fournie par le radiateur : \(P_{recue}(t)=\frac{U^2(t)}{R}\)
pertes de puissance à travers les murs : \(P_{perdue}(t)=h\left(T(t)-T_{ext}(t)\right)\)
En combinant ces équations pour ne faire apparaître que la température de la pièce \(T\) et les grandeurs externes au système (température extérieure \(T_{ext}\) et puissance reçue dépendant de la tension de commande des radiateurs \(U(t)\)), on obtient la relation :
soit
Ainsi on trouve également une équation différentielle du premier ordre, de constante de temps \(\tau=\frac{C}{h}\). Sachant qu'il y a deux entrées et que l'équation est linéaire, on étudiera par superposition la réponse à l'entrée \(U(t)\) d'une part puis à l'entrée \(T_{ext}(t)\) d'autre part.
Remarque :
La résolution de l'équation différentielle est habituellement obtenue (cf. mathématiques) en sommant :
une solution particulière \(s_p(t)\) qui caractérise le comportement du système pendant le régime permanent ou établi et qui est de la même forme que l'entrée du système
une solution de l'équation différentielle sans second membre (équation homogène) \(s_g(t)\) qui correspond au comportement du système pendant le régime transitoire.
En Sciences Industrielles pour l'Ingénieur, nous utiliserons la transformée de Laplace pour obtenir si nécessaire l'expression de la sortie du système \(s(t)\).