Réponse indicielle (i.e. à un échelon)
Définition : Réponse indicielle
La réponse indicielle est celle du système à une entrée \(e(t)=e_0\ u(t)\), avec :
\(e_0\) : amplitude constante
\(u(t)\) : fonction échelon
La réponse temporelle à une entrée en échelon (réponse indicielle) d'un système du premier ordre est :
Fondamental : Allure de la réponse indicielle
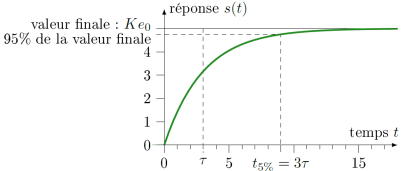
Fondamental : Tracé et propriétés remarquables
La valeur finale (valeur asymptotique) est \(s_{\infty}=K\ e_0\)
Pour \(t=\tau\), la réponse atteint environ 63% de la valeur finale car \(s(\tau)=K\ e_0\ (1-e^{-1})=0.6321 \ s_{\infty}\)
Pour \(t=3\tau\), la réponse atteint 95% de la valeur finale car \(s(3\tau)=K\ e_0\ (1-e^{-3})=0.9502 \ s_{\infty}\) ; on a donc \(t_{r5\%}=3\tau\).
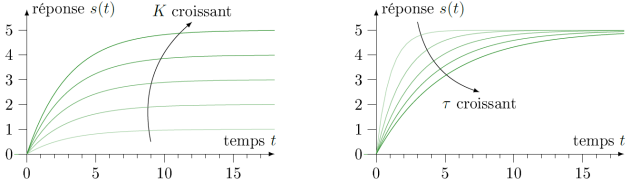
La réponse indicielle ne présente pas d'oscillations. En effet, \(s'(t)=\frac{Ke_0}{\tau}e^{-\frac{t}{\tau}}u(t)>0\ \forall t\), donc \(s(t)\) est strictement croissante.
La pente de la tangente à l'origine est non nulle : \(s'(0)=\frac{Ke_0}{\tau}\)
Plus \(\tau\) est élevée, plus le système est lent.
Exemple : En travaux pratiques : articulation de bras robot Maxpid
Remarque : Valeur asymptotique de la réponse indicielle (i.e. entrée échelon d'amplitude e0)
Lorsque \(t \rightarrow \infty\), la sortie \(s(t)\) va se "stabiliser" autour d'une valeur constante.
La dérivée \(\frac{d \ s(t)}{dt}\) va tendre vers \(0\) et l'équation différentielle (représentant donc le comportement du système) va devenir \(s(t) = K \ e(t)\). La valeur asymptotique de la sortie sera donc le produit de \(K\) avec l'amplitude de l'échelon d'entrée \(e_0\).