Forme de l'équation différentielle
Définition :
La forme générale de l'équation différentielle caractéristique d'un système du second ordre est :
avec :
\(\omega_0\) la pulsation propre (non amortie) en rad/s
\(m\) le coefficient d'amortissement, positif et sans unité
\(K\) le gain statique (unité [s]/[e])
\(\frac{1}{\omega_0^2}\frac{d^2s(t)}{dt^2}\) est bien homogène à \(s(t)\) car \(\frac{1}{\omega_0^2}\) en secondes au carré "compense" la division par \(dt^2\).
\(\frac{2m}{\omega_0}\frac{ds(t)}{dt}\) est bien homogène à \(s(t)\) car \(\frac{2m}{\omega_0}\) en seconde "compense" la division par \(dt\).
Remarque :
Le coefficient d'amortissement peut être décrit par d'autres lettres : \(\xi, \zeta, \epsilon\) ou \(z\). Le but est surtout d'éviter la confusion avec une autre grandeur qui pourrait avoir la même notation.
Exemple : Mouvement d'une roue par rapport au châssis d'un véhicule
La roue d'un quad est reliée au châssis par l'intermédiaire d'un amortisseur et d'un ressort montés en parallèle. Ce système peut être modélisé par une masse reliée en série à un ressort et un amortisseur montés en parallèle. On note \(f(t)\) la force exercée sur la masse \(M\), et \(y(t)\) la position de cette masse par rapport à la position d'équilibre.
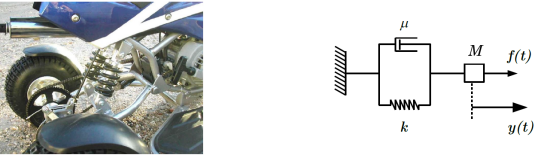
En appliquant le Principe Fondamental de la Dynamique sur la masse \(M\) soumise à l'action du ressort (\(-k\ y(t)\)), de l'amortisseur (\(-\mu\ \dot y(t)\)) et à la force \(f(t)\), on obtient l'équation :
En posant \(\frac{1}{\omega_0^2}=\frac{M}{k}\), \(\frac{2m}{\omega_0}=\frac{\mu}{k}\) et \(K=\frac{1}{k}\), l'équation correspond à celle d'un système de second ordre :
Remarque :
Lors de la résolution "mathématique traditionnelle" (solution particulière + solution homogène) de l'équation du système de second ordre, on obtiendra différents résultats suivant la valeur de \(m\). En effet, les racines - notées \(p_1\) et \(p_2\) - du polynôme caractéristique associé à l'équation homogène pourront être :
différentes et réelles si \(m>1\)
identiques et réelles ("racine double") si \(m=1\)
complexes conjuguées si \(m<1\)
Les réponses d'un système de second ordre seront donc différentes suivant la valeur du coefficient d'amortissement \(m\).