Réponse impulsionnelle
m > 1 : régime apériodique (ou amorti)
Si l'amortissement \(m\) est suffisamment grand (\(>1\)), alors la réponse du système de second ordre est de la forme :
\[s(t)=\frac{K \omega_0}{2 \sqrt{m^2-1}} \left(e^{p_1 t}-e^{p_2 t}\right) u(t)\]
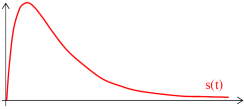
Réponse impulsionnelle d'un second ordre amorti
m = 1 : régime critique
L'allure de la réponse obtenue sera comparable à celle du régime apériodique. Il sera en revanche impossible dans la réalité d'avoir m exactement égal à 1.
m < 1 : régime pseudo-périodique
Si l'amortissement \(m\) est trop faible (\(<1\)), alors la réponse du système de second ordre est de la forme :
\[s(t)=\frac{K \omega_0}{\sqrt{1-m^2}}e^{-m \ \omega_0 \ t} \sin\left( \omega_0 \sqrt{1-m^2}\ t\right) u(t)\]
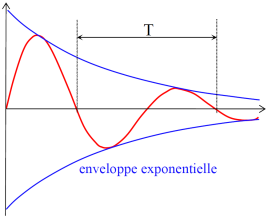
Réponse impulsionnelle d'un second ordre oscillant
La pseudo-période des oscillations vaut \(T=\frac{2 \pi}{\omega_0 \sqrt{1-m^2}}\).
Remarque : Cas où m=0 (pas d'amortissement)
L'allure de la réponse obtenue serait une sinusoïde de pulsation \(\omega_0\).