Réponse indicielle
Définition : Réponse indicielle
La réponse indicielle est celle du système à une entrée \(e(t)=e_0\ u(t)\), avec :
\(e_0\) : amplitude constante
\(u(t)\) : fonction échelon
Remarque : Valeur asymptotique de la réponse indicielle (i.e. entrée échelon d'amplitude e0)
Lorsque \(t \rightarrow \infty\), la sortie \(s(t)\) va se "stabiliser" autour d'une valeur constante, qu'il y ait eu des oscillations ou non auparavant.
Les dérivées \(\frac{d^2\ s(t)}{dt^2}\) et \(\frac{d \ s(t)}{dt}\) vont tendre vers \(0\) et l'équation différentielle (représentant donc le comportement du système) va devenir \(s(t) = K \ e(t)\). La valeur asymptotique de la sortie sera donc le produit de \(K\) avec l'amplitude de l'échelon d'entrée \(e_0\).
m > 1 : régime apériodique (ou amorti)
Si l'amortissement \(m\) est suffisamment grand (\(>1\)), alors la réponse du système de second ordre est de la forme :
Fondamental : Réponse indicielle si m>1
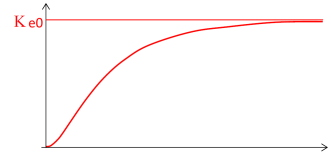
Fondamental : Tracé et propriétés remarquables
La valeur finale (valeur asymptotique) est \(s_{\infty}=K\ e_0\)
La réponse indicielle ne présente pas d'oscillations ni de dépassement.
La pente de la tangente à l'origine est nulle : \(\lim\limits_{t \to 0} s'(t)=\lim\limits_{t \to 0}K \ e_0 \ \left[\frac{\omega_0}{2 \sqrt{m^2-1}}\left(e^{p_1 t}-e^{p_2 t}\right)\right] u(t)=0\)
Plus \(m\) est proche de 1, plus le système est rapide.
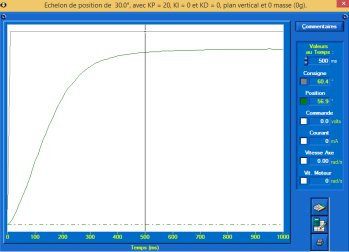
Exemple : Réponse indicielle de l'articulation de bras Maxpid
Complément :
Avec \(\tau_1 = -\frac{1}{p_1}\) et \(\tau_2 = -\frac{1}{p_2}\), l'expression \(s(t)=K \ e_0 \ \left(1+\frac{p_2}{p_1-p_2}\ e^{p_1 t}-\frac{p_1}{p_1-p_2}\ e^{p_2 t}\right) \cdot u(t)\) devient \(s(t)=K \ e_0 \ \left(1+\frac{\tau_1}{\tau_2-\tau_1}\ e^{-t/\tau_1}-\frac{\tau_2}{\tau_2-\tau_1}\ e^{-t/\tau_2}\right) \cdot u(t)\)
Cela permet d'assimiler la réponse du système à celle d'un premier ordre si \(\tau_1 \gg \tau_2\)
m = 1 : régime critique
La solution complète est \(s(t)=K\ e_0 [1-(\omega_0 \ t +1)e^{-\omega_0 \ t}]\ u(t)\).
Fondamental :
Les propriétés sont identiques à celles du régime apériodique, le régime critique étant le cas limite quand \(m \rightarrow 1\). Il sera en revanche impossible dans la réalité d'avoir \(m\) exactement égal à \(1\).
m < 1 : régime pseudo-périodique
Si l'amortissement \(m\) est trop faible (\(<1\)), alors la réponse du système de second ordre est de la forme :
Fondamental : Réponse indicielle si m<1
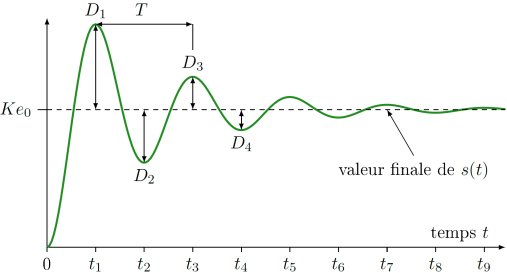
Fondamental : Tracé et propriétés remarquables
La valeur finale (valeur asymptotique) est \(s_{\infty}=K\ e_0\)
La réponse présente des oscillations. On note :
\(\omega=\omega_0 \sqrt{1-m^2}\) la pseudo-pulsation
\(T=\frac{2\pi}{\omega}=\frac{2\pi}{\omega_0\sqrt{1-m^2}}\) la pseudo-période
La réponse présente des dépassements. Ils sont caractérisés par :
l'instant du \(k^{eme}\) dépassement : \(t_k=\frac{k\pi}{\omega_0\sqrt{1-m^2}}\)
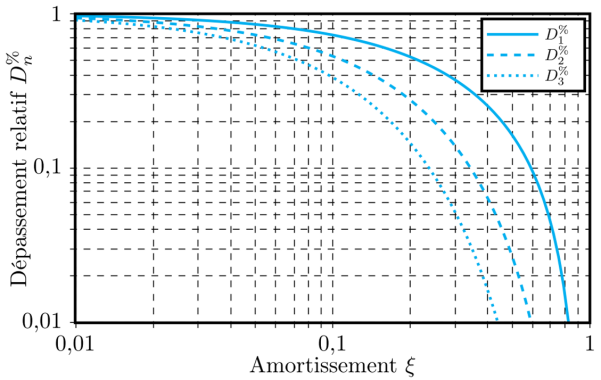
le \(k^{eme}\) dépassement relatif \(D_k^\% = \left|\frac{s(t_k)-s(\infty)}{s(\infty)}\right|=e^{\frac{-k\pi m}{\sqrt{1-m^2}}}\)
La pente de la tangente à l'origine est nulle
Remarque : Temps de réponse d'un système de second ordre
Il n'existe pas de formule simple pour calculer le temps de réponse à 5% car il dépend de la valeur du coefficient d'amortissement \(m\) et de la pulsation propre non amortie du système \(\omega_0\). On utilise alors un abaque[1] (fourni par les énoncés) donnant la valeur du temps de réponse réduit \(t_{5\%}\cdot\omega_0\) en fonction du coefficient d'amortissement \(m\).
Le temps de réponse à 5% le plus faible est cependant obtenu pour \(m=0.69\). En effet, pour cette valeur, le premier dépassement relatif vaut \(D_1^\% \approx 0.05\).
Remarque : Évolution des dépassements en fonction de l'amortissement
Les dépassements relatifs ne dépendent que de \(m\) !