Architecture du système EVOLAP didactisé
Différences et similitudes par rapport au robot EVOLAP industriel
Le robot didactisé reprend les principes du robot industriel.
un manipulateur principal à 2 ddls
un bras articulé
un positionnement du manipulateur principal
un laparoscope simplifié
Il n'y a pas de manipulateur local mécanique. Seul un zoom manuel de la caméra est disponible.
Le positionnement du manipulateur principal est réduit par rapport au robot industriel. Seule une translation latérale est disponible pour le manipulateur et la deuxième translation est possible sur le pelvitrainer lui-même. Ces réglages de position sont modifiables sous le plateau.
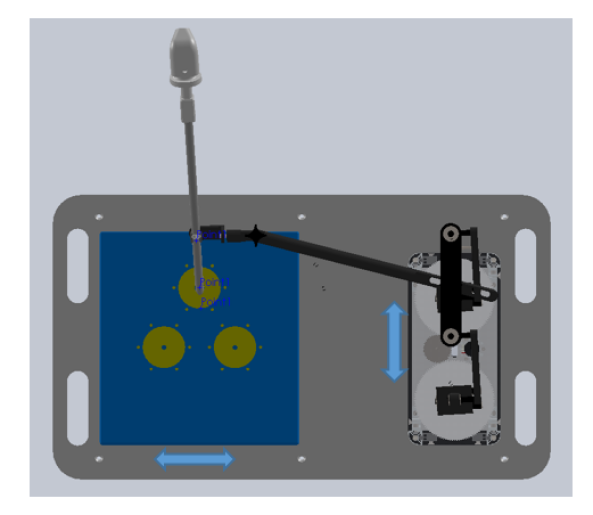
Le laparoscope est remplacé par un tube contenant une caméra de type endoscopique. Le trocart dans lequel est emmanché le laparoscope a également été enlevé.
Les solutions mécaniques ont également été adaptées pour réduire le coût du robot (remplacement du coupleur électrique pour éviter l'enroulement des câbles par une solution à différentiel, système d'équilibrage, dispositif pour éliminer les sur-mobilités...)
Les matériaux retenus ont été également légèrement adaptés en gardant les contraintes de légèreté, robustesse mais en diminuant le coût.
Des éléments spécifiques à l'instrumentation ont été ajoutés dans le robot didactisé et sont décrits dans une autre section.
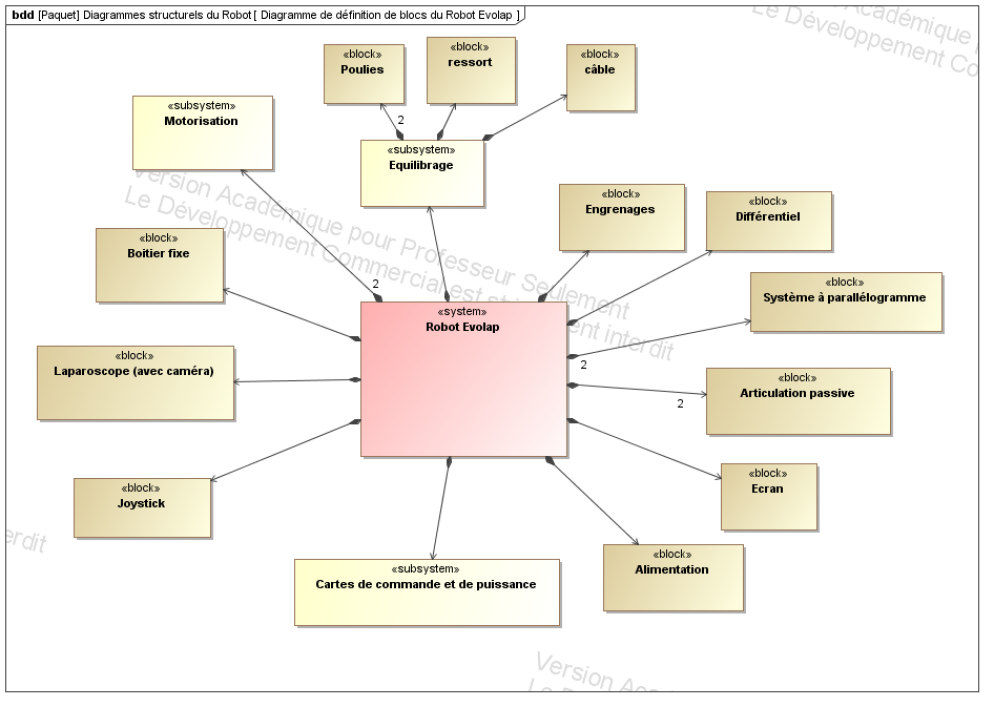
BDD
Le diagramme BDD suivant liste l'ensemble des éléments utilisés dans le robot EVOLAP didactisé. Chaque élément est décrit dans la suite.