Différentiel
Structure
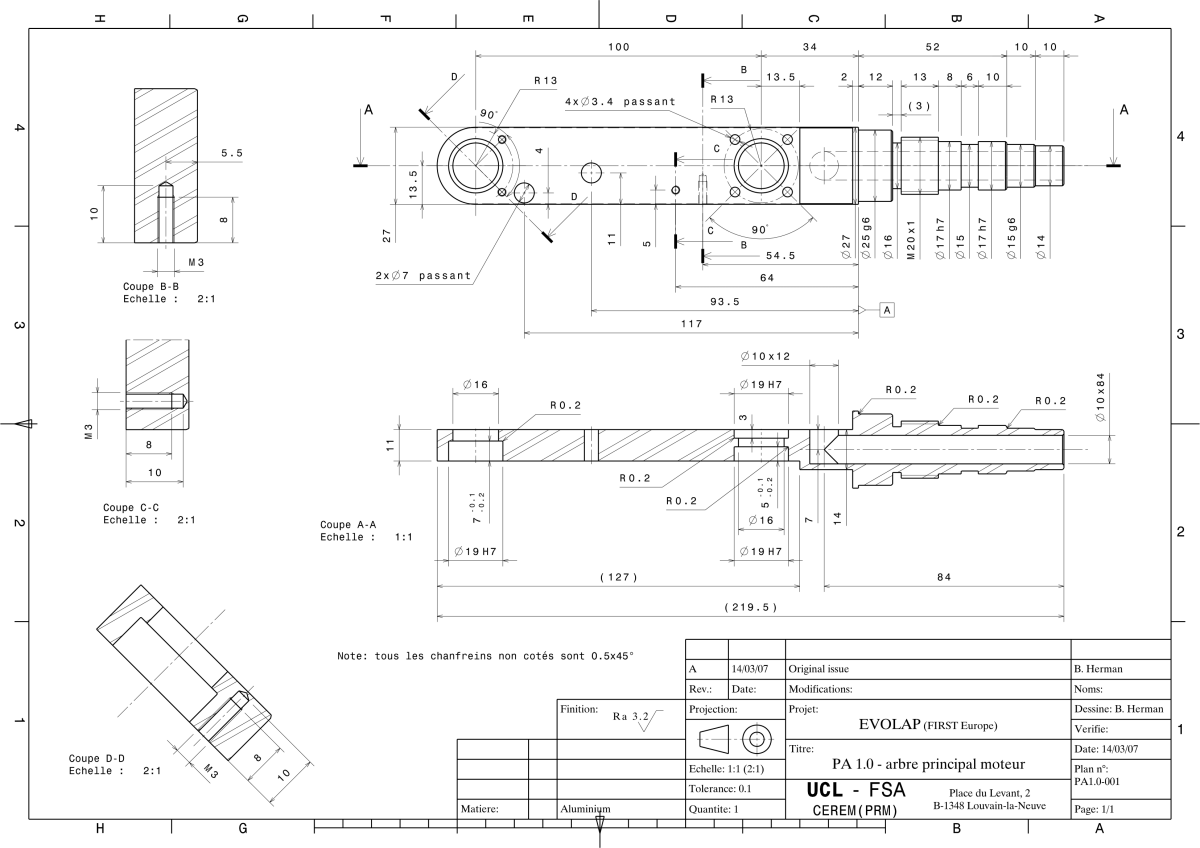
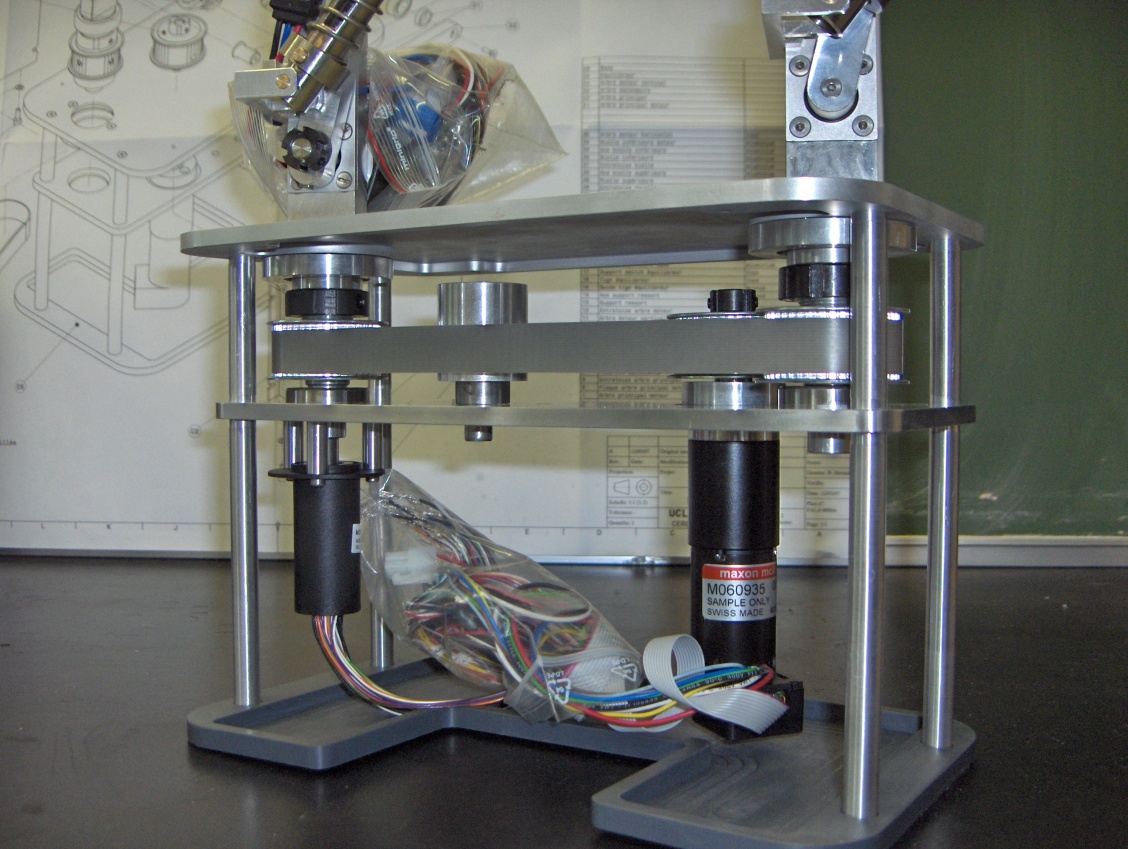
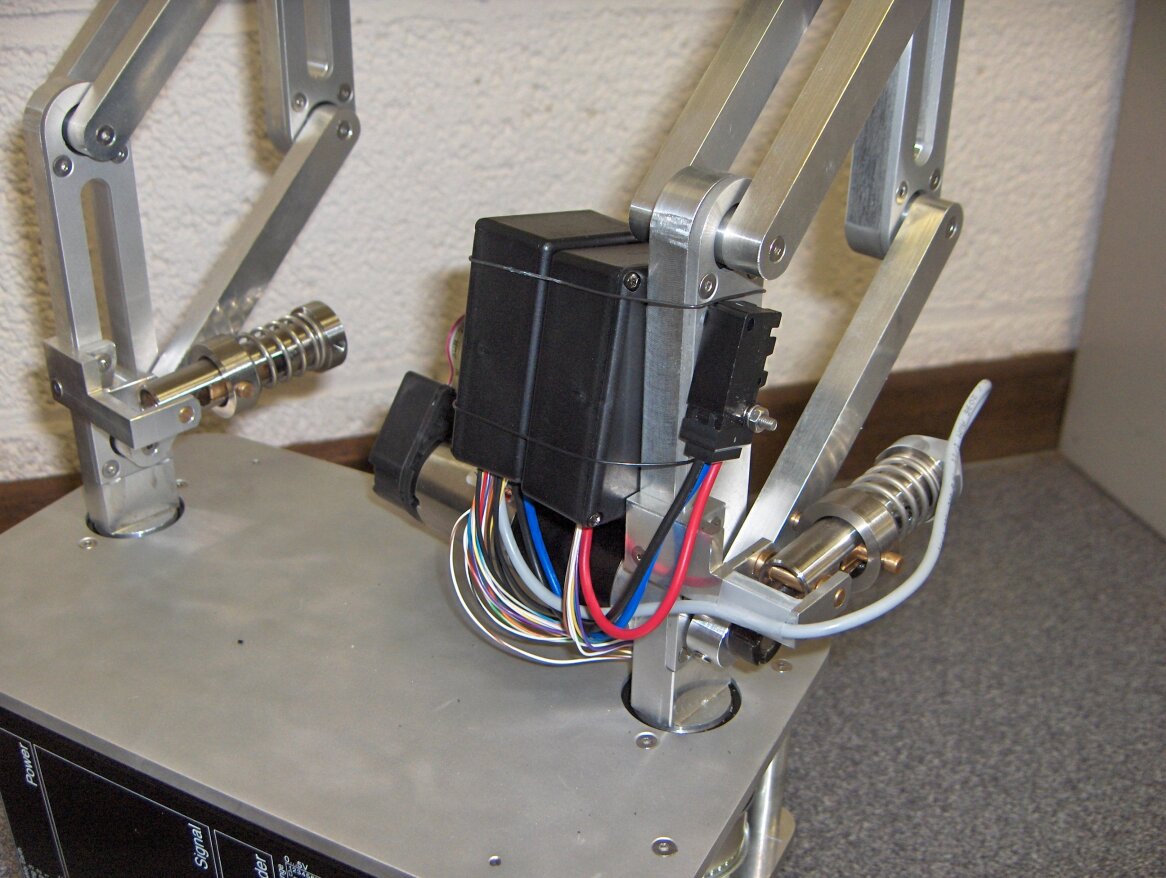
Dans le système industriel, le moteur d'élévation est fixé sur la partie mobile du parallélogramme horizontal. Ceci implique de s'assurer que les fils du moteur et codeur ne s'enroulent pas. La solution retenue est un collecteur tournant MOOG AC6355 à 36 pistes en or. (très onéreux). Les images suivantes permettent d'observer ce composant et le passage des fils sur le robot industriel. Le collecteur est monté sous l'arbre principal dont le plan est joint pour voir le canal de passage des câbles, qui sortent perpendiculairement à la face latérale plane et sont ensuite rassemblés dans les deux boitiers noirs (comportant des PCB de connexion) visibles sur la deuxième photo.
Sur le système didactisé, en suivant les propositions des concepteurs du robot EVOLAP, les deux moteurs ont été placés verticalement et fixes par rapport au bâti. Une solution à base de différentiel a été utilisée.
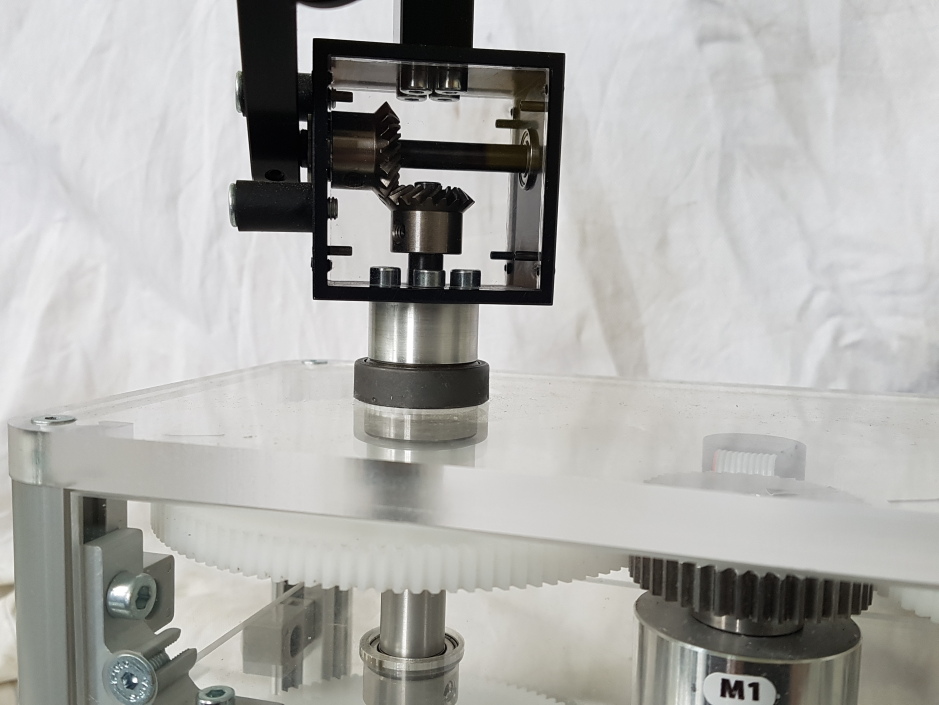
Cette solution diminue le coût du robot mais nécessite une adaptation de la commande et entraîne un couplage des mouvements (un moteur ne pilote pas un seul mouvement haut-bas ou gauche-droite). Le montage de l'axe de cet ensemble doit être fait avec précision pour obtenir un fonctionnement sans point dur.
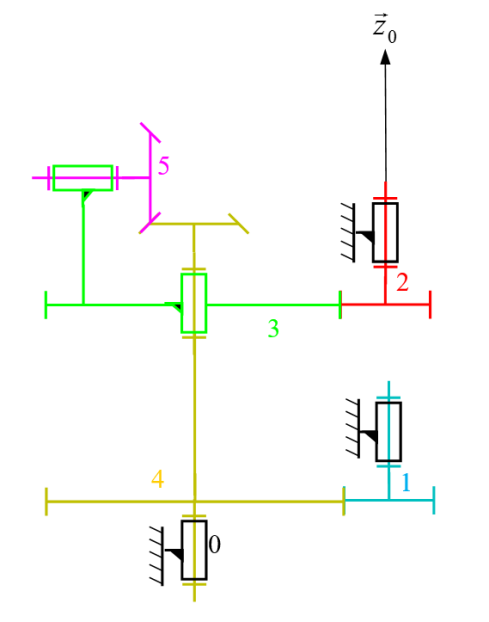
Les caractéristiques des différentes roues sont les suivantes :
roues 1 et 2 : module 1, acier 20NCD2, 40 dents (HPC - roue dentée acier G1-40 [pdf] [pdf])
roues 3 et 4a : module 1, 112 dents en Delrin (HPC - roue dentée Delrin ZG1-112 [pdf])
roues coniques 5 et 4b à denture hélicoïdale, module 1, 20 dents en acier EN 1.1191 avec placage électrocatalytique au nickel (Misumi KGEAPTG1.0-2020-6 [pdf])
Cinématique
Le parallélogramme vertical (mouvement haut-bas) est solidaire de la pièce 5, tandis que le parallélogramme horizontal (mouvement gauche-droite) est solidaire de la pièce 3.
On peut montrer que \(\omega_{5/3}=\omega_{3/0}-\omega_{4/0}\) et donc \(\omega_{5/3}=\frac{-Z_2}{Z_3} \left(\omega_{1/0}-\omega_{2/0}\right)\)
Ainsi pour faire bouger uniquement le parallélogramme vertical, il suffit de bloquer le moteur relié à la roue 2 et commander le moteur relié à la roue 1.
Pour faire bouger uniquement le parallélogramme horizontal, il faudra non seulement commander le moteur relié à la roue 2 mais également imposer la même vitesse pour le moteur relié à la roue 1 pour que la roue 5 ne bouge pas (\(\omega_{5/3}=0\)).
mouvement haut-bas : pilotage du moteur 1
mouvement gauche-droite : pilotage du moteur 2 et 1 à la même vitesse dans le même sens
mouvement combiné : pilotage du moteur 2 seul