Motorisations
Pour permettre une manipulation manuelle du laparoscope lorsque celui-ci est connecté au système (exigence du cahier des charges), des moteurs DC sans balai équipés de réducteurs planétaires ont été choisis. Contrairement à d'autres types de réducteurs, ceux-ci sont réversibles lorsque le rapport de réduction n'est pas trop élevé, que les frottements internes sont minimisés et que l'inertie du rotor du moteur est faible. Cette solution, certes moins efficace qu'un asservissement à effort nul, a le mérite d'être simple à implémenter et peu coûteuse (pas besoin de mesurer les efforts appliqués à la main).
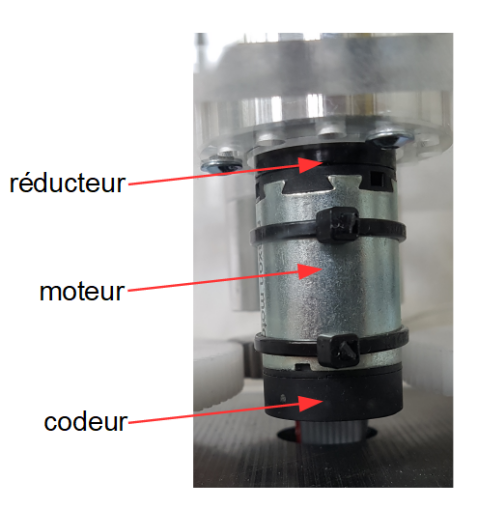
Le manipulateur principal est constitué de deux degrés de liberté motorisés. Les deux motorisations sont des motoréducteurs avec codeur incrémental Maxon A-MAX 22. Les caractéristiques des moteurs et réducteurs à train épicycloïdal sont données dans les datasheet suivantes :
Moteur A-max 22 Ø22 mm, balais en graphite, 6 W, avec terminaux, rérérence 110160
Réducteur planétaire GP 22 A Ø22 mm, 0,5 - 1,0 Nm, modèle en métal, référence 134162
Codeur MR, type M, 512 impulsions, 2 canaux, avec attaque de ligne, référence 201937
Les réducteurs sont en acier comme pour la motorisation du robot industriel.
L'ensemble motoréducteur a été dimensionné pour pouvoir maintenir le laparoscope dans une position sans système d'équilibrage (le moteur pour l'élévation est le plus contraignant).