Système à parallélogramme
L'originalité du robot EVOLAP est d'induire par l'intermédiaire de 2 parallélogrammes orthogonaux, deux déplacements angulaires du point de préhension du laparoscope sur une sphère de rayon R.
Le parallélogramme situé dans le plan vertical gère le mouvement d'élévation du laparoscope tandis que le parallélogramme horizontal (visible en regardant sur le dessus le robot) gère le mouvement d'azimut du laparoscope.
Le parallélogramme vertical a été doublé pour des raisons de rigidité et d'esthétisme uniquement.

Chaque biellette est en alliage d'aluminium AlMgSi0.5 (EN AW-6060 T66 [pdf]).
Les axes principaux sont en AlMgSiBi (EN AW-6026 T6 [pdf])
Des butées en polyuréthane empêche la fermeture du parallélogramme vertical dont le débattement angulaire est ainsi limité à 70°.
Le parallélogramme horizontal autorise plusieurs tours du laparoscope sans aucune contrainte. Lorsque le parallélogramme est fermé (biellettes toutes alignées), il apparaît une sur-mobilité (mobilité interne) qui conduit à une position instable pouvant entraîner la modification du parallélogramme qui perd alors toute rigidité.
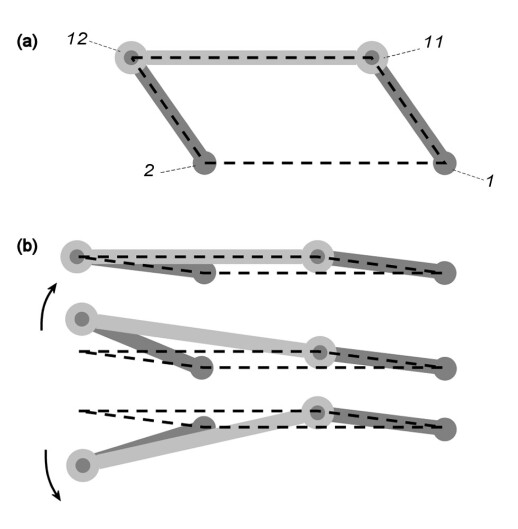
Pour éviter cette perte de rigidité et garder la forme correcte du parallélogramme, la solution utilisée dans le robot industriel est d'ajouter un parallélogramme en parallèle de celui-ci. Lorsque le parallélogramme principal est fermé, l'autre est complètement ouvert. Cette solution nécessite plus de pièces et induit des contraintes de montage fortes.
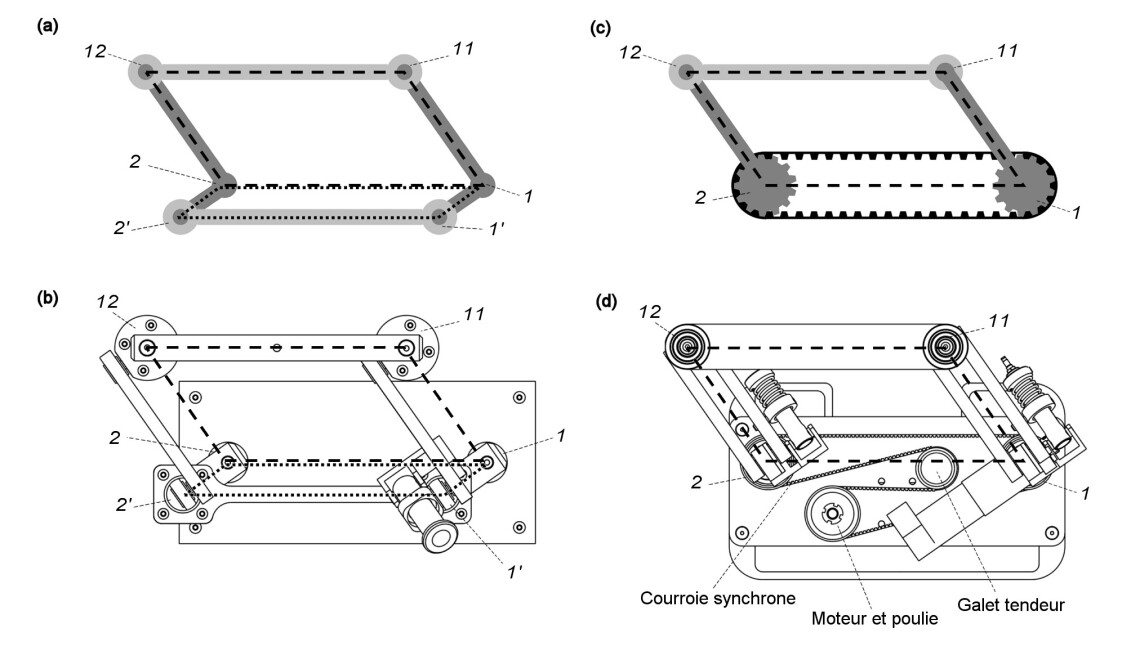
L'autre solution consiste à synchroniser les deux liaisons pivots avec le bâti par l'intermédiaire d'un système de courroie ou d'engrenage. C'est la solution retenue sur le système didactisé. Le moteur engrène avec deux roues dentées solidaires chacune d'un des axes des liaisons pivots du parallélogramme.
PHOTO ROUE DE SYNCHRO
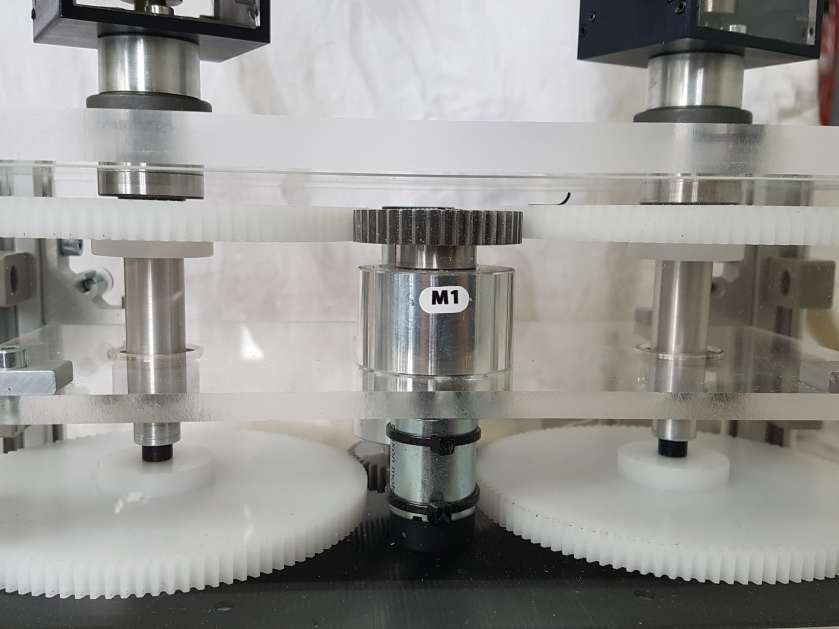
La documentation des roues dentées en Delrin utilisées est disponible ci-après.